-
连云港安防巡检机器人价格
随着科技日新月异的发展,特种巡检机器人的性能正在迎来质的飞跃,其应用范围也将日益扩大,覆盖更多领域。展望未来,这些巡检机器人预计会融入更多前列技术,如人工智能的高级算法和机器视觉的先进技术,从而提升其自动化水平和作业效率。与此同时,随着5G、物联网等前沿技术的迅猛发展,特种巡检机器人将能够与互联网、大数据等先进科技更紧密地结合,实现更加高...
查看详细 >>24 2024-11 -
重庆巡检机器人哪家好
反馈控制策略在机器人控制系统中的应用在机器人控制系统中,反馈控制策略扮演着至关重要的角色。它依赖传感器实时捕捉机器人的位置、速度等关键信息,并与预设的期望值进行精确比较。一旦发现两者之间存在误差,反馈控制系统会立即根据误差信号对机器人进行调整,直至误差被完全消除。这种控制策略以其快速响应和出色的稳定性赢得了非常大认可。然而,要实现高效的反...
查看详细 >>24 2024-11 -
北京安保巡检机器人厂家
人工智能巡检机器人的应用不仅提高了作业现场的安全可靠性能,还降低了企业的运营成本。它们能够代替部分人工巡检工作,减少了人力资源的投入;同时,由于机器人具有高度的自动化和智能化水平,能够减少人为因素带来的错误和疏漏,从而提高了整体的工作效率和质量。在未来,随着技术的不断进步和应用场景的不断拓展,人工智能巡检机器人将在更多的高危作业领域中发挥...
查看详细 >>24 2024-11 -
黄浦区机器人设计
运动控制驱动器与执行器:巡检机器人通过搭载的驱动器和执行器实现机器人的运动控制。这些驱动器和执行器可能包括电机、轮子、履带等,根据路径规划算法得到的比较好路径,机器人可以实现移动和转向。移动方式:通常采用轮式或履带式移动方式,以适应不同的室内环境和地形。数据处理与决策数据收集:巡检机器人会收集感知到的数据,如图像、声音、温度等。数据处理:...
查看详细 >>24 2024-11 -
湖北机房巡检机器人公司
管道巡检机器人的优势相比传统的人工巡检方式,管道巡检机器人具有以下优势:高效性:机器人可以连续工作,不受疲劳和天气等因素的影响,提高了巡检的效率和频率。同时,它们能够在短时间内完成大范围的巡检任务。精确性:通过传感器和摄像头等高精度设备,机器人能够收集到更准确的数据,为管道维护提供更加可靠的依据。同时,它们能够发现人工难以察觉的潜在问题。...
查看详细 >>24 2024-11 -
四川线型探测器价格
图像型火灾探测器的工作原理主要包括以下几个步骤:图像采集:通过工业光学镜头捕捉被保护区域的视频图像。图像预处理:对采集到的图像进行去噪、增强、二值化等预处理操作,以提高图像质量和清晰度。特征提取:从预处理后的图像中提取与火灾相关的特征信息,如颜色、形状、运动轨迹等。火灾识别:基于火灾识别算法,对提取出的特征信息进行分析和处理,以判断是否发...
查看详细 >>24 2024-11 -
湖南巡检机器人哪个好
多功能机械臂:管道巡检机器人的关键组件之一是多功能机械臂。这款机械臂设计精巧,具备强大的抓取、搬运和操作能力,可以轻松穿越狭窄、曲折的管道。它的灵活性和可靠性使得机器人能够在各种复杂的管道环境中高效工作。高精度传感器:机器人搭载了多种高精度传感器,用于实时监测管道内部的状态信息。这些传感器能够准确感知管道内的温度、压力、湿度以及潜在的泄漏...
查看详细 >>24 2024-11 -
江苏安保巡检机器人安装
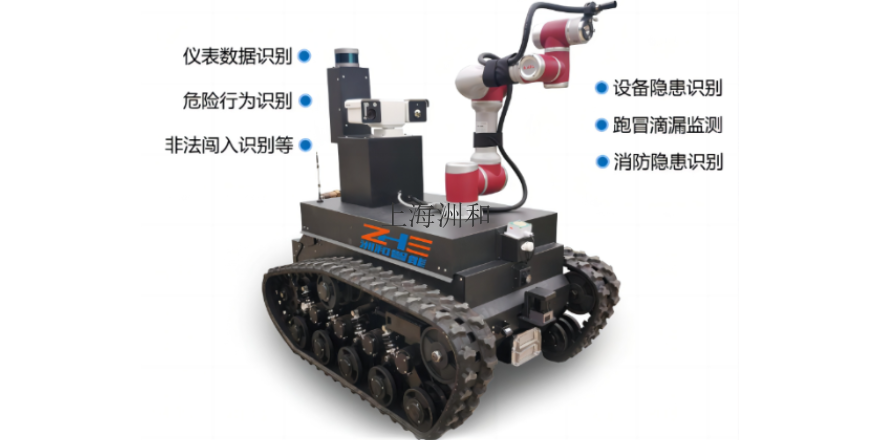
工智能巡检机器人在提升作业安全方面展现出了巨大的潜力。通过集成机器视觉、红外热成像、气体检测等先进模块,这些机器人能够迅速且准确地识别作业现场的各类安全隐患,如设备故障、气体泄漏、火灾隐患等。这种技术的应用,降低了冶金、化工、矿山等高危作业对人员的潜在伤害风险,为这些行业带来了前所未有的安全保障。人工智能巡检机器人的优势不仅在于其高效的隐...
查看详细 >>24 2024-11 -
虹口区防爆巡检机器人哪家好
安保巡检机器人是一种基于先进技术研发出的智能设备,专为各种场合的安保巡逻和检查工作而设计。随着科技的进步和成本的降低,这种机器人已经在多个领域得到广泛应用,为人们的生产生活带来了极大的便利和安全。一、技术特点智能感知系统:安保巡检机器人配备了高性能的感知系统,通过图像识别、声音识别等技术,能够实时感知并识别周围环境中的目标。这种能力使得机...
查看详细 >>24 2024-11 -
辽宁高压细水雾泵头探测器厂家报价
线型光束感烟火灾探测器的设置应符合下列规定:(此条1.2.两点重点记)1.探测器的光束轴线至顶棚的垂直距离宜为0.3m~1.0m,距地高度不宜超过20m。相邻两组探测器的水平距离不应大于14m,探测器至侧墙水平距离不应大于7m,且不应小于0.5m,探测器的发射器和接收器之间的距离不宜超过100m。探测器应设置在固定结构上。探测器的设置应保...
查看详细 >>23 2024-11 -
机器人哪家好
安保巡检机器人是一种基于先进技术研发出的智能设备,专为各种场合的安保巡逻和检查工作而设计。随着科技的进步和成本的降低,这种机器人已经在多个领域得到广泛应用,为人们的生产生活带来了极大的便利和安全。一、技术特点智能感知系统:安保巡检机器人配备了高性能的感知系统,通过图像识别、声音识别等技术,能够实时感知并识别周围环境中的目标。这种能力使得机...
查看详细 >>23 2024-11 -
普陀区机器人哪个好
反馈控制策略在机器人控制系统中的应用在机器人控制系统中,反馈控制策略扮演着至关重要的角色。它依赖传感器实时捕捉机器人的位置、速度等关键信息,并与预设的期望值进行精确比较。一旦发现两者之间存在误差,反馈控制系统会立即根据误差信号对机器人进行调整,直至误差被完全消除。这种控制策略以其快速响应和出色的稳定性赢得了非常大认可。然而,要实现高效的反...
查看详细 >>23 2024-11