-
江苏数字煤场管控系统库存管理有哪些
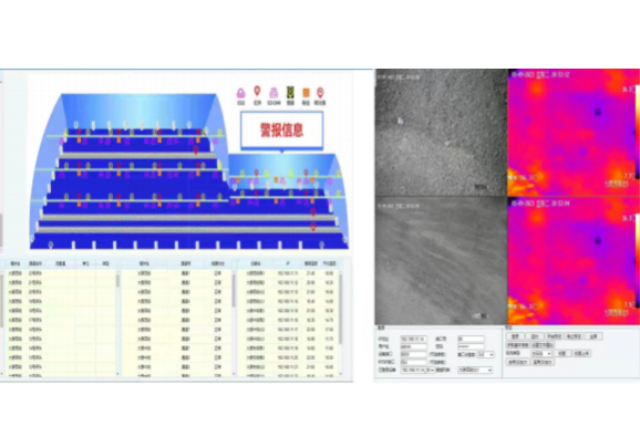
煤矿生产数字煤场管控系统的解决方案专注于煤场管理的智能化与信息化,旨在提升企业的运营效率和安全保障。该方案通过构建三维数字煤场,实现对煤种及相关参数的分区管理,实时监测各存煤区域的煤量和温度状态。系统集成自动测量、数据实时传输及同步控制功能,保障煤场数据的及时更新和准确性,支持科学取煤方案的自动计算与动态调整。在进煤管理方面,方案细化卸煤...
查看详细 >>31 2025-10 -
山西堆取料机无人值守系统刮板防撞数据
远程控制功能在石化行业的堆取料机无人值守系统中占据重要位置,满足了安全与效率的双重需求。系统依托无线通信网络,实现料场设备与中控室之间的数据实时交互,支持远程视频监控及操作指令的传输。操作人员无需进入现场,只需在输料综合楼的控制台,通过操纵杆、按钮及选择开关即可完成堆料和取料的全过程控制。系统支持手动、半自动及全自动等多种操作模式,适应不...
查看详细 >>31 2025-10 -
河北堆取料机无人值守系统数字化实时扫描
控制台在一体化堆取料机无人值守系统中扮演着关键的交互角色,负责设备监控、作业指令执行及安全保障。该控制台设计涵盖操纵杆、按钮和选择开关等多种操作元件,便于操作者在输料综合楼内进行远程控制。通过直观的显示界面,能够实时反馈堆取料机运行状况、料堆三维模型及作业进度,支持作业计划调整和异常处理。控制台支持远程手动、半自动及全自动三种模式切换,满...
查看详细 >>31 2025-10 -
江苏堆取料机无人值守系统激光扫描软件架构
激光扫描技术在圆形堆取料机无人值守系统中承担着关键的测绘任务。通过在堆料机悬臂的两侧配置高精度激光扫描仪,系统能够以扇形扫描的方式迅速捕获料堆的三维数据。这些扫描数据涵盖了料堆的边界形状、堆积角度及高度等重要几何信息,同时能够反映料堆形态的实时变化,辅助实现取料位置的准确确定。采用垂直向下的安装架构,有效减少了扫描盲区,提升了测量的稳定性...
查看详细 >>31 2025-10 -
北京堆取料机无人值守系统智能化检测
在GPS堆取料机无人值守系统中,测绘技术是实现精确控制的基础环节。系统采用激光扫描仪对料堆进行连续的三维扫描,采集堆体的形状、堆高和宽度等关键参数。扫描装置一般安装于堆取料机门架或悬臂侧面,以垂直向下的扇形扫描方式减少盲区,保证数据的完整性。采集到的测绘信息通过软件处理,形成料堆的三维模型,并与GPS定位数据结合,建立统一的空间坐标体系。...
查看详细 >>31 2025-10 -
陕西堆取料机无人值守系统安全防护怎么操作
激光扫描技术在无人值守堆取料系统中承担着关键的数据采集任务,负责实时获取料堆的三维形态。系统在半门式取料机门架高处两侧安装高精度激光扫描仪,采用垂直扇形扫描,精确捕捉料堆的堆积角度与高度变化,尽量避免盲区,保证数据的完整性。回转堆料机悬臂两侧同样布置激光扫描仪,持续跟踪料堆轮廓,辅助确定堆料起止点、俯仰角度及行走距离。采集的点云数据由中控...
查看详细 >>31 2025-10 -
山东堆取料机无人值守系统条形的作用
条形堆取料机无人值守系统的仿真处理技术主要依赖于激光扫描仪对料堆进行连续的三维数据采集,形成详尽的数字化料堆模型。通过三维图形绘制技术,这些数据被转换成直观的三维图像,清晰展现料堆的空间分布和形态特征。系统进一步将模型中的关键坐标点,转化为控制指令,用以指导堆取料机的自动定位和作业路径规划。随着料堆形态的变化,仿真处理系统能够调整堆料和取...
查看详细 >>31 2025-10 -
浙江堆取料机无人值守系统自动堆料怎么操作
石化行业的料场管理面临多样化的堆料形态和复杂作业需求,如何实现堆取料机的无人值守成为关注焦点。理想的无人值守系统应具备精确的料堆扫描和智能调度能力,同时兼顾安全防护。通过激光扫描技术,系统能够实时捕获料堆的三维轮廓,构建动态的数字模型,辅助作业的精确执行。结合斗轮机定位识别及料位检测功能,设备能够根据不同料堆的高度和形状自动调整作业参数,...
查看详细 >>31 2025-10 -
福建堆取料机无人值守系统半门式
在GPS堆取料机无人值守系统中,测绘技术是实现精确控制的基础环节。系统采用激光扫描仪对料堆进行连续的三维扫描,采集堆体的形状、堆高和宽度等关键参数。扫描装置一般安装于堆取料机门架或悬臂侧面,以垂直向下的扇形扫描方式减少盲区,保证数据的完整性。采集到的测绘信息通过软件处理,形成料堆的三维模型,并与GPS定位数据结合,建立统一的空间坐标体系。...
查看详细 >>31 2025-10 -
贵州安装流程堆取料机无人值守系统
刮板防撞堆取料机无人值守系统的实时扫描技术,是实现智能化作业的关键环节。该技术依托高精度激光扫描仪,对料堆进行扇形区域的快速扫描,捕获其三维形态及边界特征。激光扫描装置通常安装于取料机门架的高处两侧或堆料机悬臂两侧,采用垂直向下的挑空安装方式,以确保扫描的稳定性并减少盲区。扫描获得的数据经由中控系统处理后,形成完整的三维料堆图像与信息库,...
查看详细 >>31 2025-10 -
河北堆取料机无人值守系统激光扫描怎么操作
悬臂防撞堆取料机无人值守系统的操作依赖于PLC控制指令的准确传递和执行。PLC系统接收中控平台制定的堆取料作业计划,将其转化为具体的指令,控制堆取料机的各个机械部件。系统首先利用激光扫描仪对料堆进行实时的三维扫描,采集详细的几何信息,随后中控系统对这些数据进行分析,确定料堆特征及作业路径。PLC根据处理结果,计算出悬臂的俯仰角度、回转角度...
查看详细 >>31 2025-10 -
山西堆取料机无人值守系统条形PLC控制指令
操作安全性是安全急停堆取料机无人值守系统设计中的重要考量,系统操作流程力求简洁明了,便于操作者快速应对紧急情况。通过输料综合楼内的控制台,操作人员能够远程监控设备状态并下达指令。控制台配备操纵杆、按钮和选择开关,界面清晰,支持多种操作模式切换,包括远程手动、远程半自动和远程全自动堆取。急停按钮布局合理,除远程操作台的硬紧停按钮外,设备本体...
查看详细 >>30 2025-10