- 品牌
- TOYO
- 型号
- 齐全
- 输入方式
- 触摸屏输入
- 产品认证
- ISO9001,质量保障
- 外形尺寸
- 齐全
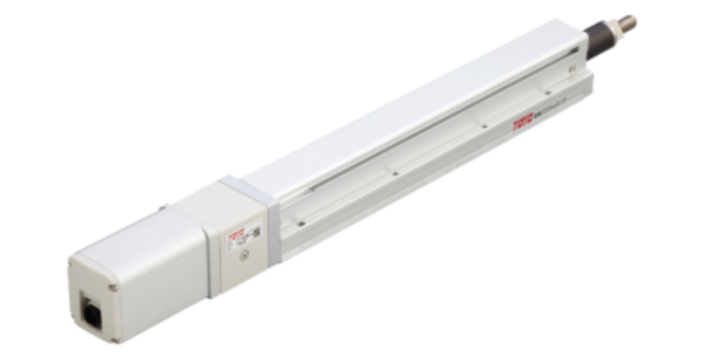
伺服电动机与步进电动机的区别?伺服电机是一种闭环伺服机构,它使用位置反馈来控制其运动和后面位置。控制输入是代为输出轴指令位置的信号(模拟或数字)。电机与某种类型的位置编码器配对以提供位置和速度反馈。在简单的情况下,只测量位置。将测量的输出位置与命令位置(控制器的外部输入)进行比较。如果输出位置与要求的位置不同,则会生成一个错误信号,然后根据需要将电动机沿任一方向旋转,以将输出轴移至适当的位置。随着位置的接近,误差信号减小到零,并且电动机停止。简单的伺服电动机通过电位计和电动机的声控制使用只位置感测;电动机始终以全速旋转(或停止)。这种类型的伺服电动机并未广大用于工业运动控制中,但它构成了用于无线电控制模型的简单廉价的伺服电动机的基础。更复杂的伺服电机使用光学旋转编码器来测量输出轴的速度,并使用变速驱动器来控制电机速度。这两种增强功能通常与PID控制算法结合使用,可以使伺服电机更快,更精确地到达其指令位置,而不会出现过冲现象。TOYO直线电机,以直线方式提供电力牵引的动力源。高精度TOYO东佑达有铁芯线性马达机械手直供
TOYO
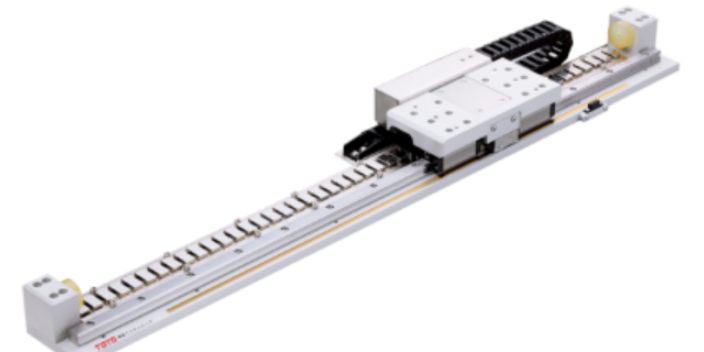
夹持器选择和设计的注意事项。在确定较适合该项目的夹具时,必须考虑许多特定于您的应用程序的因素,但较好做法是尽量保持简单。以下是一些有助于更好地理解不同类型的夹持器模块的概念以及一些需要遵循的基本设计注意事项。夹持器足迹在设计过程中很重要,因为它决定了夹持器在不受周围其他物体干扰的情况下,在环境中需要多少可用空间来抓取物体。随着视觉系统的进步,这变得更加重要,允许工件以非传统方式呈现,例如随机放置在传送带上或散装容器中。不同品种的动力类型用于驱动夹具驱动,主要有气动或电动两种。选择电源可以像工厂车间可用的电源一样简单,但也可以对自动化系统的设计产生更具体的影响。气动夹爪使用压缩空气驱动夹爪体内的气缸机构,转换运动以打开和关闭夹爪。压缩空气在大多数设施上的广大可用性以及夹具的简单开关动作使其成为工业应用的热门选择。使用气动夹具可以控制很少的参数,并且只能通过提供给夹具的气压来控制施加到物体上的力。由于缺乏可调节性,每个模块通常针对一项特定任务进行设置,并且通常需要定制手指组件来与工件交互。工业东佑达机械手华东总代理TOYO直线电机通常用于驱动高性能工业自动化设备。
机器人技术和自动化之间有什么区别?从上面的描述中,您可能会注意到机器人技术和自动化听起来是一回事。这两个工程领域之间的主要区别在于人工智能的作用。AI或人工智能允许机器人在执行任务的同时学习。自动化机器几乎不会被设计为在工作中学习。他们会漫不经心地完成他们的任务,即使他们任务之外的因素干扰。机器人技术将采用机器人并应用人工智能。这些机器人现在将在执行工作的同时观察周围环境并根据他们的发现改变他们的表现。例如,想想一台3d打印机。这是一个机器人,旨在挤出细丝以创建3d对象。想象一下打印到一半,挤出机堵塞并停止挤出细丝。自动打印机将继续打印对象,即使没有灯丝出来。机器人打印机会感应到挤出机被卡住,执行耗材清洗,并且只有在检测到耗材再次开始挤出时才继续打印。
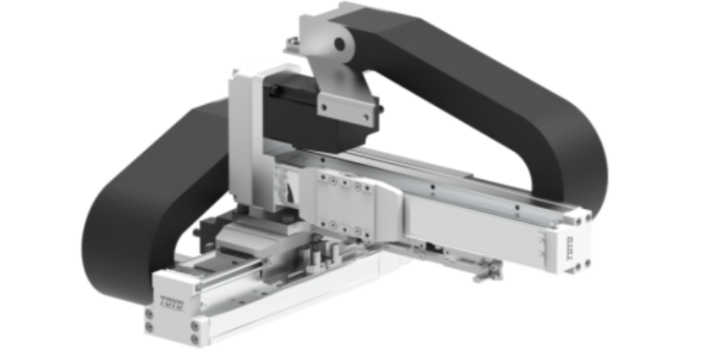
电动夹持器使用伺服系统和其他类型的电机来打开和关闭夹持器的钳口。这允许在尝试对多个位置进行编程时精确控制夹具的位置和行程。一些型号提供可定制的速度和加速度,这将增加夹具模块的灵活性,使其成为各种尺寸或更小、精致零件的理想选择。电动夹具非常适用于无法接触压缩空气或不允许在流程周围使用压缩空气的应用,例如洁净室。电动夹持器通常需要外部控制器和其他与电力相关的设备才能操作,而且编程可能不那么简单。夹持器尺寸对整个抓取系统的功能性和安全性非常重要。机器人的有效载荷受到限制,尤其是在以较高速度移动部件时,因此抓取器的尺寸应尽可能小,同时仍允许由机器人执行一组任务机器人。事实上,在重量方面,所有在操作过程中将附着在机械臂或夹持器模块上的物体都应该计入这个重量考虑中。TOYO电机与线性平台并排的折叠传动系减少了长度并便于集成。
什么是真空马达?越来越多的高科技应用需要真空解决方案,以较大程度地减少不必要的化学反应或污染工艺或周围设备的机会。运动是真空环境中的主要挑战之一。可维修性,可靠性,多功能性和除气是真空应用中的关键因素,其中之一可能会导致较长的停机时间。总拥有成本应超过初始投资。真空中运动系统的维护成本可能很高。线性真空额定电动机没有运动部件,并且无摩擦,因此无需维护。此外,直线电机可以整体置于真空中,因此不需要进料槽,从而节省了成本。运动系统的大量排气会影响生产过程。真空额定无铁直线电机是专门设计的特有线圈单元和磁轭,适用于高真空(低至10-8)和系列产品可达到的较低除气量。TOYO直线电机与旋转机器不同,直线电机不会为被驱动物体产生旋转运动。高精度TOYO东佑达有铁芯线性马达机械手直供
TOYO夹爪还有一种用于提升大型工件的长行程抓取器。高精度TOYO东佑达有铁芯线性马达机械手直供
电动夹爪的配件。扭矩传感器:扭矩传感器与抓手一起安装在机器人手臂上。该传感器可测量多达六个自由度的力和扭矩,并将该数据传回机器人控制器,从而修正机器人的路径或运动。这种类型的系统适用于公差很小的复杂装配操作,或者在砂光或抛光等压力敏感应用中。工具更换器是自动化系统的关键部分,其中多个夹具或外部工具必须在机器人末端进行更换,以完成一项或一组任务,同时保持机器人手臂本身的尺寸精度和可重复性。在实施单个机器人以有效执行多项操作时,这可以降低总体资本支出,并有助于减少生产产品所需的制造时间。更换器包括一个连接到机器人手臂的底座,每个工具都需要一个相应的耦合器来与机器人接口。提供手动和气动版本。高精度TOYO东佑达有铁芯线性马达机械手直供
上海裕飞机电有限公司目前已成为一家集产品研发、生产、销售相结合的贸易型企业。公司成立于2010-05-07,自成立以来一直秉承自我研发与技术引进相结合的科技发展战略。公司主要产品有模组,直线电机,电缸,工业机器人等,公司工程技术人员、行政管理人员、产品制造及售后服务人员均有多年行业经验。并与上下游企业保持密切的合作关系。TOYO,YAMAHA,东佑达,雅马哈,大寰,越疆,李群,丹尼克尔,埃斯顿以符合行业标准的产品质量为目标,并始终如一地坚守这一原则,正是这种高标准的自我要求,产品获得市场及消费者的高度认可。上海裕飞机电有限公司以先进工艺为基础、以产品质量为根本、以技术创新为动力,开发并推出多项具有竞争力的模组,直线电机,电缸,工业机器人产品,确保了在模组,直线电机,电缸,工业机器人市场的优势。
- 中国台湾TOYO东佑达有铁芯线性马达机械手型号 2026-04-11
- 高精度TOYO螺杆型直交机械手华东总代理 2026-04-11
- 自动化TOYO东佑达机器人供应 2026-04-11
- 自动化TOYO电动夹爪产品手册 2026-04-11
- 高精度TOYO东佑达轨道内嵌式滑台华东总代理 2026-04-10
- 高精度TOYO螺杆滑台功能 2026-04-10
- 工业东佑达电动缸代理 2026-04-10
- 智能东佑达机械手总代理 2026-04-10
- TOYO电动滑台华东总代理 2026-04-10
- 智能TOYO电动滑台产品手册 2026-04-10
- TOYO东佑达皮带滑台产品手册 2026-04-10
- 中国台湾东佑达螺杆滑台 2026-04-09