Simple|简捷用户接口的革新:将以往复杂难用的工业机器人编程界面简单化,将各个编程工具模块化、图样化,通过笔记本电脑、平板电脑或插上显示器及键盘鼠标,即可开始编程。您的双手即是导师:TM拥有便捷的手拉示教的功能,通过机器人末端的功能按键可轻松地拉动机器人,并记录点位,整个示教过程轻松,且易于操作。简单学习,轻易上手:TMRobot拥有一套经过优化使用者体验、简化编译流程的创新系统。我们期望,在信息快速变迁的时代,让您能够快速地掌握更新技术,并与TMRobot共同迈向工业4.0时代。 达明机器人,就选达明机器人(上海)有限公司,用户的信赖之选,欢迎您的来电哦!北京自动贴标达明机器人控制
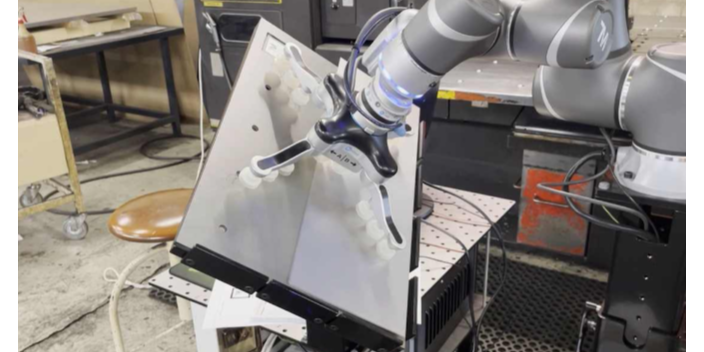
达明机器人移动上下料平台方案,采用移动上下料的方式,代替人工作业。轻量化设计,机器人自重负载比低,移动方便。机器人采用100~240V交流供电,或者22~60V直流供电,功耗300W,供电非常方便。同时达明特有的Landmark标签贴付在CNC设备上。手臂末端相机只需要看一眼,就可以快速补偿移动上下料平台的高度,角度,倾斜度的误差。并立即开始作业。利用协作机器人代替人工作业数控机床上下料,操作安全、简便、提高工作效率的同时,也能改善工人的工作环境。 辽宁打磨达明机器人控制达明机器人,就选达明机器人(上海)有限公司,有需要可以联系我司哦!

机器视觉是协作机器人智能化的一个重要指标。如果机器人没有配备视觉,使用坐标定义在RobotBase上,若手臂与环境位置有变动时,所有点位需要几个小时甚至几天重新调整。当机器人一旦拥有视觉之后,将目标物坐标系统建在Landmark上,只须看一眼,所有点位即立即完成误差补偿,而TMlandmark技术就是达明机器人在机器视觉上具有的技术优势。该项技术是将目标物坐标系统建在landmark之上,快速补偿高度,角度,倾斜度误差,使协作机器人简单通过视觉,就可以运用2D视觉实现3D定位效果。达明的3D视觉通过简单四步轻松即可顺利完成任务,它的应用场景可用于组装、检测、产品包装,无序抓取等。
作为海内外协作型机器人和智能视觉系统先驱,达明机器人针对AGV/AMR搭配的复合机器人应用场景推出直流电源版本的手臂(M系列),透过TM特有的Landmark及TMvision视觉系统建立动态相对坐标体系并实现跨手臂点位共享,弥补AMR行走的运动偏差并精细定位、平稳取放,非常适用于医疗及半导体行业移动搬运、智能巡检、移动式堆栈、加工机床上下料等要求机动性高、精度高的应用。巡检机器人是优艾智合OW系列搭载达明机器人的移动复合机器人,它在现实生活中也承担着重要的作业任务。如海上石油平台等极端复杂的环境中,优艾智合-达明智能巡检运维机器人自主执行无人作业,将人类从艰苦繁重的任务中解放出来,7*24小时保障安全稳定高效的生产运营。 达明机器人(上海)有限公司是一家专业提供达明机器人的公司,欢迎您的来电哦!

达明机器人重磅推出高负载手臂TM20、TM25S新品,可兼容于市面上多种品牌的无人搬运车AGV/AMR,搬运更大负载的晶圆盒上下料,适用于半导体AMR应用场景。当AMR使用达明机器人导入半导体应用时,内建智慧视觉能弥补AGV的行走误差,并精细定位进行快速的取放任务,提高生产稼动率,无须额外整合视觉,降低整合的时间与费用。TMLandmark坐标系统,可透过扫描实时更新手臂与环境点位的相对位置,相较于以往坐标建立在机械手臂基座上更有效率。 达明机器人,就选达明机器人(上海)有限公司,让您满意,欢迎新老客户来电!3D达明机器人制作
达明机器人(上海)有限公司是一家专业提供达明机器人的公司,欢迎您的来电!北京自动贴标达明机器人控制
随着视觉系统在自动化领域中日益重要,除了让机器设备能正确撷取物体的影像外,如何进一步对该影像做辨识、辨别更决定了视觉系统带来效益的上限。将AI人工智能引入与视觉系统做结合,以自带视觉功能的TMRobot为例,将大幅提高视觉系统带来的效益与应用领域。如工厂中的质量检测关卡,便可透过整合AI功能,让达明协作手臂自行侦测产品不符合质量规范的项目,如外观瑕疵、缺件、部件错误等等,减少人为检测疏失外,还能保留完整的产品检验履历。达明机器人提供TMAI+人工智能解决方案,让使用者可以自行训练人工智能模型,并将模型应用在达明协作型手臂上,让手臂运用人工智能进行更高阶、复杂的视觉任务。 北京自动贴标达明机器人控制






