智能草坪养护机器人在设计和制造过程中,不仅要满足基本的机器人性能要求,还要针对采摘作业对象的特点进行专门的考量。为了满足这一需求,工程师们致力于设计一种简单、紧凑且轻巧的机械手。这种机械手不仅结构简洁,易于维护,而且在采摘时能够保持高效且无损。通过精心的设计和优化,机械手在采摘过程中能够准确、快速地...
智能草坪养护机器人基本参数
- 品牌
- 熙岳智能
- 型号
- 南京熙岳智能
- 加工定制
- 是
智能草坪养护机器人企业商机
近年来,随着城市绿化面积显著提高,公共绿地定时维护、修剪工作日益繁琐。为了提高作业效率,减少劳动力成本,传统手动割草机升级为全自动的智能割草机器人成为研究的热点问题。针对目前除草机器人采用的随机式或规划式除草方式,会造成重复率高、覆盖率低及清扫时间长等问题。对于智能除草机器人而言,以较低的重复率和较高的覆盖率完成工作区域的除草工作,需要研究全区域覆盖路径规划算法。全区域覆盖路径规划就是在除草机器人的工作环境中寻找到一条可以无碰撞行走,并且可将整个工作区域全部覆盖、重复行走路径尽可能少的道路,故路径规划在其底层决策中具有关键性作用,可直接影响除草机器人的工作效率和工作精度,同时简单稳定的路径规划算法会提高除草机器人性能,质量的路径规划算法能有效降低除草机器人的工作时间、能量消耗、及自身装备的磨损,开展除草机器人的路径规划研究具有重要意义。 智能草坪养护机器人行走功能通过智能软件控制,实现前进、后退、左转、右转等基本运动.山东学校智能草坪养护机器人性能

熙岳生产的智能草坪养护机器人在实操过程中,用户只需要通过专门的的手机App,遥控机器人在庭院中绘制一张工作区域地图即可。地图中不仅可以记录庭院的形状、边界,还可以设置需要避开的禁区,如花盆、树木、桌子等。根据这些信息,机器人便可自行规划比较好割草路径,自主进行无边界规划式割草,并借助独具视觉特征的偏置刀盘设计。在割草结束后,还会绕整个草坪的边界完成一圈巡线任务,把草坪边界割得更干净,因此相比其他割草机器人产品,熙岳生产的智能草坪养护机器人的割草效果会更好。相比传统割草机器人,熙岳生产的智能草坪养护机器人能够随时执行修剪任务,然后自动返回充电,并借助规划式割草实现断点续割,不会对已割草区域进行无效的二次切割。并且用户还能通过刀盘电动调节功能,无需弯腰就能通过App设置割草高度,从而根据个人喜好随时改变花园中草的高度,甚至可以在情人节为女友割出一个爱心状。重庆家庭智能草坪养护机器人公司几个人就可以操作控制几台机器人,然后就可以完成几 百几千亩地的工作,非常的省时省力。

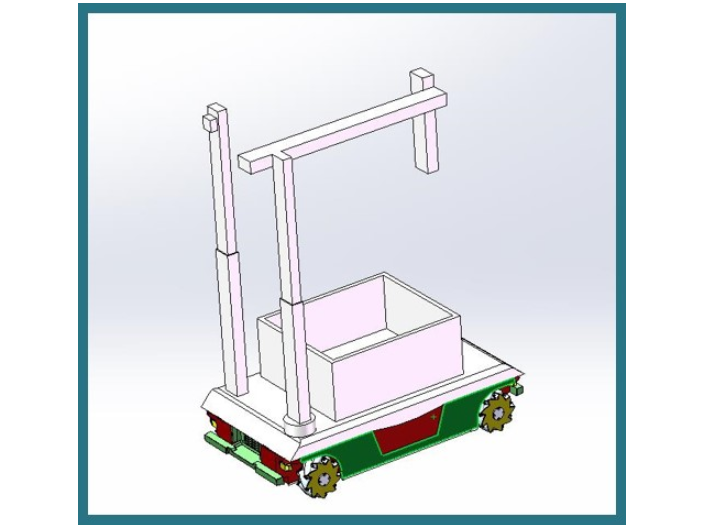
智能草坪养护机器人就被设计出用来解决这个问题,据悉,其利用人工智能(AI)自主来出色地完成这项工作。熙岳生产的智能草坪机器人看起来很有意思。据了解,它的“肚子”里可以装有1升的水,另外在它的后边还有用于放置除草剂和杀虫剂的舱室,草坪修剪叶片则在下面、一个平衡装置稳定的旋转炮塔在前面。智能草坪养护机器人长什么样?到底有什么用呢?据外媒报道,园艺对很多人来说是一件非常有益的事情,但仍有一些跟庭院相关的工作是非常麻烦的。
田间的杂草可以用智能草坪养护机器人去除吗?杂草依旧是困扰农民的问题,虽然可以人工拔除,但人力太昂贵,于是有些支持免耕农法,但还是想追求经济效益的农民,便会采用化学除草剂来杀死杂草。可是,除草剂会让杂草产生抗药性,迫使农民的除草剂愈喷愈多、愈喷愈毒,有些除草剂还会随风飞散、影响附近其他作物。有时候,农民还不得不采购经过基因改造的种子,因为,唯有这类种子才能抵抗除草剂的毒性。所以希望能找出节省人力、经济实惠、又不使用杀草剂的除草方式,我们发明了智能草坪养护机器人,它可以智能去做除草工作!除草机器人技术不断优化升级,我国智能化农业才能得到快速发展,“无人农业”将有望实现。

智能草坪养护机器人的工作原理为:1)该机器人可以沿着作物的行间行驶,改进了现有很多机器人骑在作物行上行驶的方式。骑在作物行上行驶的缺点是机器高度要适应作物高度(机器必须做得比作物还高),而在作物行间行驶就不受作物高度影响。2)摄像头对作物行内的杂草和作物信息进行采集,如果检测到作物行内是作物时,行内除草装置在控制系统作用下缩回机架,以避开作物;通过作物后,行内除草装置在控制系统作用下再伸出机架,继续行内除草并涂抹施药。3)行间除草不需识别,直接正常除草并涂抹施药。4)设计两种并施的除草方式,首先利用除草刀片进行机械式剪锯切断杂草,达到快速除草效果,然后涂抹施药装置再对杂草切口涂抹除草剂,做到精细施药。精细施药与喷洒农药式相比,药剂注入草体效率高,除草效果更好,同时避免了无效用药,节省了除草剂用量,使农药浪费减少。除草机器人应用于足球场、高尔夫球场、景观等草坪杂草去除作业。天津草坪智能草坪养护机器人按需定制
除草机器人杂草识别率 > 99%。山东学校智能草坪养护机器人性能
智能草坪养护机器人可以根据杂草颜色特征,提出了新的图像分割算法,在RGB空间直接将杂草从土壤背景中分割出来。首先顺序搜索图像中每一个像素点,如果当前像素RGB值中G>R且G>B,则将该像素值置1(杂草),否则为0(背景),从而完成图像分割。然后采用8邻域消除孤立点,并确定杂草区域位置。利用VisualC++开发了除草机器人杂草识别软件,设计了除草机器人结构模型。试验表明,该分割算法实时性好,可有效识别出杂草,并能够适应户外自然光变化。除草机器人机械臂能够准确定位,完成除草动作。山东学校智能草坪养护机器人性能
与智能草坪养护机器人相关的文章

福建家庭智能草坪养护机器人定制
- 福建农业智能草坪养护机器人产品介绍 2025-01-15
- 吉林绿化带智能草坪养护机器人处理方法 2025-01-13
- 江苏绿化带智能草坪养护机器人案例 2025-01-13
- 吉林草坪智能草坪养护机器人制造价格 2025-01-13
- 天津养护智能草坪养护机器人价格 2025-01-11
- 智能草坪养护机器人定制价格 2025-01-11
- 天津现代智能草坪养护机器人按需定制 2025-01-11
- 广东供应智能草坪养护机器人私人定做 2025-01-10
- 江西智能智能草坪养护机器人案例 2025-01-09
- 天津学校智能草坪养护机器人售价 2025-01-09
- 浙江现代智能草坪养护机器人性能 2025-01-08
- 上海节能智能草坪养护机器人性能 2025-01-07
与智能草坪养护机器人相关的产品

与智能草坪养护机器人相关的新闻
-
天津智能草坪养护机器人优势 2025-01-02 12:03:02智能草坪养护机器人凭借其机动性和精确的定位能力,可以在各种地形和地块间极速穿行,无论是平坦的草坪、斜坡还是不规则的边缘地带,都能轻松应对。这款机器人装备了先进的视觉系统和导航系统,能够准确识别出杂草,并根据其种类和分布情况进行精确去除。在极速穿行的过程中,机器人还具备智能避障功能,能够自动避开障碍物...
-
浙江现代智能草坪养护机器人技术参数 2025-01-02 16:03:13智能草坪养护机器人被设计成能够在田间进行自动巡视,一旦发现杂草,就会迅速启动电击除草锄进行作业。这一系列动作包括机器人准确定位杂草位置,调整除草锄的角度和高度,然后启动电击功能,使除草锄对杂草进行精确而迅速的电击。这一过程中,电击除草锄能够有效地破坏杂草的生长组织,从而将其消灭。整个过程中,智能草坪...
-
吉林杂草智能草坪养护机器人价格低 2025-01-01 04:02:44智能草坪养护机器人运用基于机器视觉的杂草检测算法,其目标在于通过训练带有注释数据的模型,实现对新数据结果的准确预测。这一过程中,首先需收集大量的带有注释的草坪图像数据,这些数据包含了杂草的位置、种类以及其他相关信息。然后,算法会利用这些数据进行训练,以构建一个能够识别杂草的模型。当模型训练完成后,它...
-
福建制造智能草坪养护机器人 2025-01-01 11:02:55智能草坪养护机器人通过远程控制功能,真正实现了双手的解放,让用户无需亲自操作即可完成草坪的养护工作。这一功能不仅提高了操作的便捷性,还使得除草过程更为精细。通过精确识别和定位杂草,智能草坪养护机器人能够精确地执行除草任务,避免了人工操作可能出现的疏漏。因此,使用智能草坪养护机器人不仅可以大幅减轻劳动...
与智能草坪养护机器人相关的问题
新闻资讯
产品推荐
-

福建自动智能采摘机器人按需定制
2026-04-04 -

铅板定制机器视觉检测服务服务价格
2026-04-04 -

北京自动智能采摘机器人服务价格
2026-04-04 -
山东智能定制机器视觉检测服务价格
2026-04-04 -
江苏冲网定制机器视觉检测服务价格
2026-04-04 -

河南自制智能采摘机器人解决方案
2026-04-04 -

江苏猕猴挑智能采摘机器人定制
2026-04-04 -
浙江传送带跑偏定制机器视觉检测服务价格
2026-04-04 -
天津篦冷机工况定制机器视觉检测服务产品介绍
2026-04-04