机器人焊钳在节约材料方面有很多优势。首先,机器人焊钳可以精确地控制焊接过程,从而减少焊接过程中的浪费。其次,机器人焊钳可以根据需要自动调整焊接参数,以更大程度地利用材料。此外,机器人焊钳可以在焊接过程中使用较少的焊接材料,从而减少材料的浪费。除此之外,机器人焊钳可以在焊接过程中使用先进的焊接技术,如激光焊接,从而减少材料的损耗和浪费。总之,机器人焊钳在节约材料方面具有很多优势,可以帮助企业降低成本,提高效率,提高产品质量。机器人焊钳的操作过程中能够实现自动化的物料输送和处理,提高生产线的自动化程度。四川机械臂机器人焊钳厂家
机器人焊钳是一种自动化焊接设备,主要用于工业生产中的焊接工作。它的主要功能是通过机器人的自动化控制,将焊接钳头精确地定位在需要焊接的工件上,然后进行高效、精确的焊接操作。机器人焊钳的主要功能包括以下几个方面:1.自动化控制:机器人焊钳采用计算机控制系统,能够实现自动化控制,减少人工干预,提高生产效率。2.精确定位:机器人焊钳能够通过精确的定位系统,将焊接钳头精确定位在需要焊接的工件上,确保焊接质量。3.高效焊接:机器人焊钳能够快速、高效地完成焊接工作,提高生产效率,降低生产成本。4.稳定性强:机器人焊钳采用高精度的控制系统和稳定的焊接设备,能够保证焊接质量的稳定性和一致性。5.适应性强:机器人焊钳能够适应不同形状、大小和材质的工件,具有很强的适应性和灵活性。总之,机器人焊钳的主要功能是实现自动化控制、精确定位、高效焊接、稳定性强和适应性强等方面的要求,为工业生产提供高效、精确、稳定的焊接服务。上海机械臂机器人焊钳工厂机器人焊钳的操作过程中,能够实现自动化控制,减少人为干扰和误操作。

机器人焊钳的精度和稳定性非常高,可以满足高精度焊接的要求。机器人焊钳采用先进的控制系统和传感器技术,能够实现高精度的位置控制和力控制,确保焊接过程中的稳定性和精度。此外,机器人焊钳还具有自适应控制功能,能够根据焊接材料和工件的特性进行自动调整,提高焊接质量和效率。机器人焊钳还可以通过网络连接进行远程监控和控制,实现智能化生产管理。总之,机器人焊钳的精度和稳定性非常高,可以满足各种焊接需求,提高生产效率和质量。
机器人焊钳常见的故障有以下几种:1.焊钳夹紧不牢:可能是夹紧力度不够,需要调整夹紧力度;也可能是夹紧机构损坏,需要更换夹紧机构。2.焊钳夹紧不平衡:可能是夹紧机构不平衡,需要调整夹紧机构;也可能是夹紧机构损坏,需要更换夹紧机构。3.焊钳夹紧后松动:可能是夹紧机构损坏,需要更换夹紧机构;也可能是夹紧力度不够,需要调整夹紧力度。4.焊钳夹紧后无法松开:可能是夹紧机构损坏,需要更换夹紧机构;也可能是夹紧力度过大,需要调整夹紧力度。5.焊钳夹紧机构卡死:可能是机构内部零件损坏,需要更换零件;也可能是机构内部积尘过多,需要清洗维护。解决这些故障的方法包括:调整夹紧力度、更换夹紧机构、更换零件、清洗维护等。同时,对机器人焊钳进行定期维护和保养,可以有效预防故障的发生。机器人焊钳的速度快,能够提高生产效率和产量。

机器人焊钳在焊接过程中的稳定性是通过多种方式来保证的。首先,机器人焊钳的设计和制造需要考虑到焊接过程中的稳定性,包括焊接速度、焊接力度、焊接温度等因素。其次,机器人焊钳需要配备高精度的传感器和控制系统,以确保焊接过程中的稳定性和精度。这些传感器可以监测焊接过程中的温度、压力、电流等参数,并根据这些参数进行实时调整和控制。此外,机器人焊钳还需要配备高质量的焊接材料和焊接电极,以确保焊接质量和稳定性。除此之外,机器人焊钳需要经过严格的测试和质量控制,以确保其在实际应用中的稳定性和可靠性。通过这些措施,机器人焊钳可以在焊接过程中保持稳定性,提高焊接质量和效率,为工业生产提供更加可靠的解决方案。机器人焊钳具有灵活性强、适应性广的特点,能够适应不同形状、大小的工件。陕西机械臂机器人焊钳工厂
机器人焊钳的操作过程中,能够实现远程监控和控制,提高生产管理的效率。四川机械臂机器人焊钳厂家
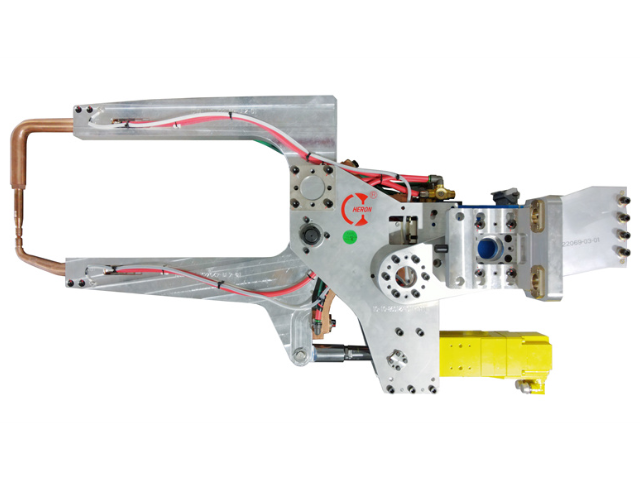
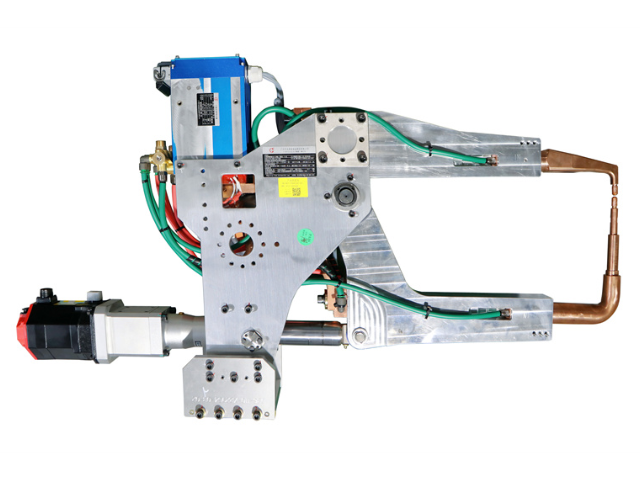
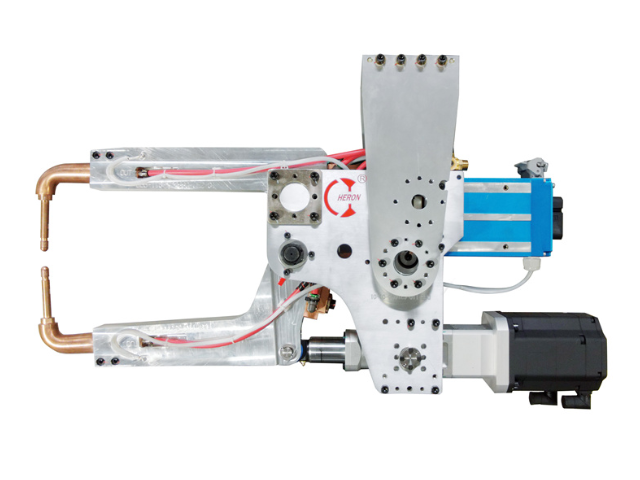
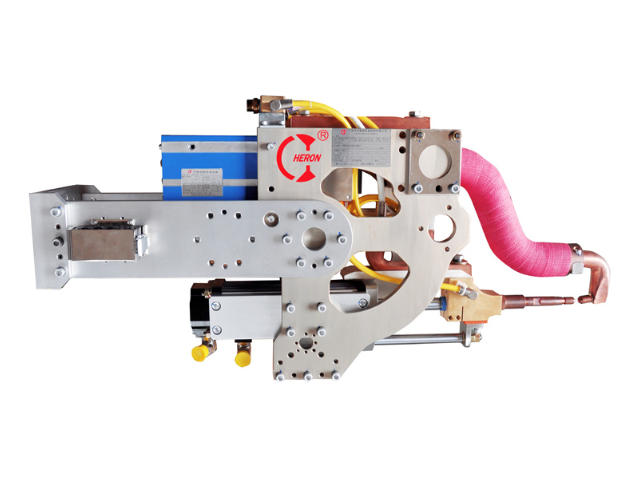
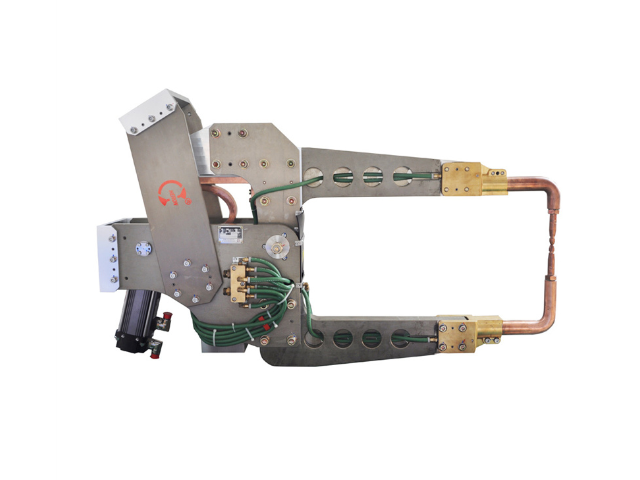
机器人焊钳是一种自动化焊接设备,由机器人手臂和焊钳组成。焊钳是机器人焊接的关键部件,它的结构设计直接影响到焊接质量和效率。机器人焊钳的结构通常包括以下几个部分:1.夹持器:夹持器是焊钳的主要部件,用于夹持焊接工件。夹持器通常由两个夹爪组成,夹爪之间的距离可以根据焊接工件的大小进行调整。2.电极:电极是焊接时传递电流的部件,通常由铜制成。电极的形状和大小可以根据焊接工件的形状和大小进行设计。3.冷却系统:焊接时会产生大量的热量,需要通过冷却系统来降温。冷却系统通常由水冷或气冷组成。4.传感器:传感器用于检测焊接工件的位置和形状,以便机器人可以准确地夹持焊接工件和进行焊接。5.控制系统:控制系统用于控制机器人焊钳的运动和焊接参数,包括焊接电流、焊接速度、焊接时间等。总之,机器人焊钳的结构设计需要考虑到焊接工件的形状和大小,以及焊接质量和效率的要求。通过合理的结构设计和控制系统,机器人焊钳可以实现高效、精确、稳定的自动化焊接。四川机械臂机器人焊钳厂家
例如,当焊接电流出现微小波动时,控制系统会立即调整电源输出,保证电流稳定在设定值范围内,从而确保...
【详情】###机器人焊钳压力控制的自适应能力 机器人焊钳的压力控制具备出色的自适应能力,这使得它能...
【详情】在现代焊接领域,机器人焊钳与传统焊钳各自有着独特的工作原理,这些差异决定了它们在不同场景下的应用...
【详情】机器人焊钳相较于传统焊钳,具有众多***优势。首先,机器人焊钳的焊接精度更高。它能够精确控制焊接参数...
【详情】电流的精确控制同样是影响焊接质量的关键因素。机器人焊钳采用先进的焊接电源和智能控制系统,能够根据不同...
【详情】机器人焊钳是一种高效、精细、可靠的焊接工具,具有广泛的应用前景。随着制造业的不断发展,对焊接质量和效...
【详情】机器人焊钳是一种高效、精细、可靠的焊接工具,具有广泛的应用前景。随着制造业的不断发展,对焊接质量和效...
【详情】从工作原理看,机器人焊钳实现高效焊接有着独特的机制。机器人焊钳主要由机械结构、电气控制和焊接组件构成...
【详情】机器人焊钳是一种高效、精细、可靠的焊接工具,具有以下优点:1.提高生产效率:机器人焊钳能够快速、准确...
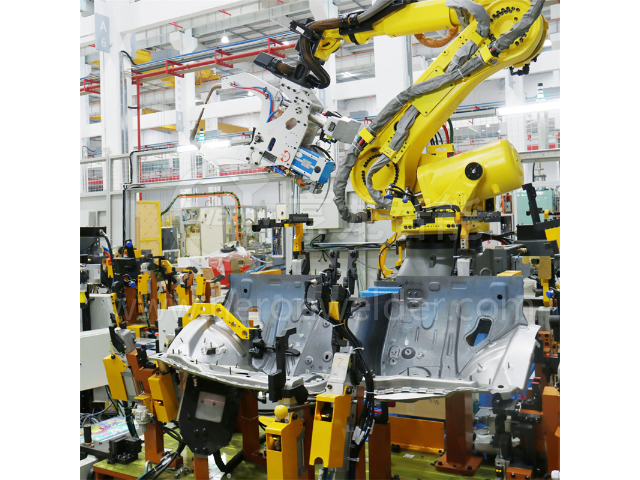
【详情】机器人焊钳在汽车制造行业中具有广泛的应用。它能够实现高精度、高效率的焊接作业,**提高了汽车生产的质...
【详情】电流的精确控制同样是影响焊接质量的关键因素。机器人焊钳采用先进的焊接电源和智能控制系统,能够根据不同...
【详情】