机器人焊钳的工作环境对其影响非常大。首先,环境温度会影响机器人的电子元件和电机的性能,因此需要在适宜的温度范围内工作。其次,环境中的灰尘、油脂和其他污染物可能会影响机器人的传感器和电子元件的性能,因此需要保持清洁。此外,机器人的工作环境还需要考虑安全因素,例如防止机器人与人员或其他设备发生碰撞,以及防止机器人在操作过程中发生故障或意外。因此,机器人焊钳的工作环境需要经过仔细的规划和设计,以确保其能够在安全、稳定和高效的条件下工作。机器人焊钳的操作过程中,能够实现自动化清洗和维护,减少维护成本。广东全自动机器人焊钳公司

机器人焊钳对提高产品质量有很大的影响。首先,机器人焊钳可以提高焊接的精度和一致性。机器人焊钳可以精确地控制焊接的位置、速度和力度,从而确保焊接的质量和一致性。这可以减少焊接缺陷的数量,提高产品的质量。其次,机器人焊钳可以提高生产效率和生产速度。机器人焊钳可以在短时间内完成大量的焊接任务,从而提高生产效率和生产速度。这可以减少生产时间和成本,提高产品的生产效率和竞争力。除此之外,机器人焊钳可以提高工作环境的安全性。机器人焊钳可以在危险的环境中工作,如高温、高压、有毒气体等环境中。这可以减少工人的伤害和事故,提高工作环境的安全性。综上所述,机器人焊钳对提高产品质量有很大的影响。它可以提高焊接的精度和一致性,提高生产效率和生产速度,提高工作环境的安全性。这可以帮助企业提高产品的质量和竞争力,从而获得更多的市场份额和利润。单机器人机器人焊钳多少钱一台机器人焊钳的操作过程中,能够实现数据记录和分析,为生产管理提供依据。

机器人焊钳的焊接参数设置需要根据具体的焊接工艺和焊接材料来确定。一般来说,焊接参数包括焊接电流、电压、焊接速度、焊接时间、焊接角度等。首先,焊接电流和电压是影响焊接质量的关键参数,需要根据焊接材料的种类、厚度、焊接位置等因素来确定。一般来说,焊接电流和电压需要根据焊接材料的熔点、热导率、热膨胀系数等因素来进行调整。其次,焊接速度和焊接时间也是影响焊接质量的重要参数。焊接速度需要根据焊接材料的熔点、热导率、热膨胀系数等因素来进行调整,而焊接时间则需要根据焊接材料的厚度、焊接位置等因素来进行调整。除此之外,焊接角度也是影响焊接质量的重要因素。焊接角度需要根据焊接材料的形状、焊接位置等因素来进行调整,以确保焊接质量和焊接强度。总之,机器人焊钳的焊接参数设置需要根据具体的焊接工艺和焊接材料来确定,需要进行多次试验和调整,以确保焊接质量和焊接强度。
机器人焊钳的自动化程度可以从以下几个方面进行评估:1.焊接精度:机器人焊钳的自动化程度可以通过焊接精度来评估。焊接精度越高,机器人焊钳的自动化程度就越高。高精度的焊接可以保证焊接质量,提高生产效率。2.焊接速度:机器人焊钳的自动化程度还可以通过焊接速度来评估。焊接速度越快,机器人焊钳的自动化程度就越高。高速焊接可以提高生产效率,降低生产成本。3.操作简便性:机器人焊钳的自动化程度还可以通过操作简便性来评估。操作简便性越高,机器人焊钳的自动化程度就越高。简便的操作可以降低操作难度,提高生产效率。4.自动化程度:机器人焊钳的自动化程度还可以通过自动化程度来评估。自动化程度越高,机器人焊钳的自动化程度就越高。高度自动化的机器人焊钳可以实现无人化生产,提高生产效率。综上所述,机器人焊钳的自动化程度可以从焊接精度、焊接速度、操作简便性和自动化程度等方面进行评估。机器人焊钳的使用可以提高生产线的灵活性和适应性,能够快速适应市场需求的变化。

机器人焊钳在焊接过程中的稳定性是通过多种方式来保证的。首先,机器人焊钳的设计和制造需要考虑到焊接过程中的稳定性,包括焊接速度、焊接力度、焊接温度等因素。其次,机器人焊钳需要配备高精度的传感器和控制系统,以确保焊接过程中的稳定性和精度。这些传感器可以监测焊接过程中的温度、压力、电流等参数,并根据这些参数进行实时调整和控制。此外,机器人焊钳还需要配备高质量的焊接材料和焊接电极,以确保焊接质量和稳定性。除此之外,机器人焊钳需要经过严格的测试和质量控制,以确保其在实际应用中的稳定性和可靠性。通过这些措施,机器人焊钳可以在焊接过程中保持稳定性,提高焊接质量和效率,为工业生产提供更加可靠的解决方案。机器人焊钳的使用可以减少人工操作,降低劳动强度和安全风险。深圳全自动机器人焊钳费用
机器人焊钳的操作过程中能够实现自动化的物料输送和处理,提高生产线的自动化程度。广东全自动机器人焊钳公司
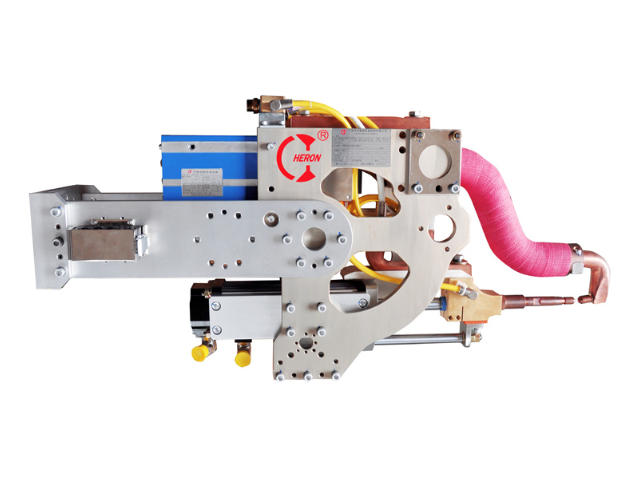
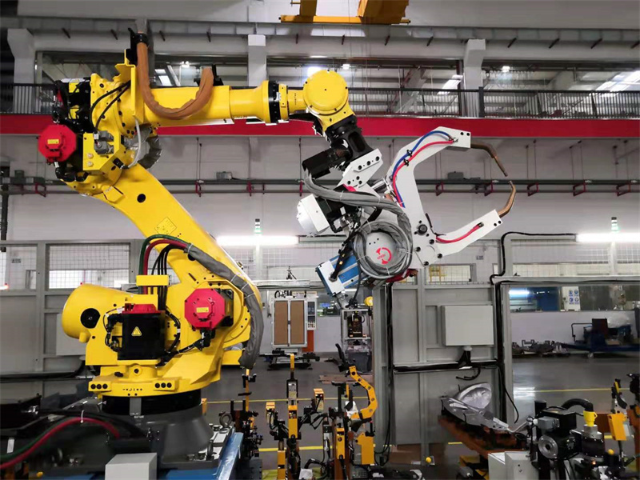
焊接机器人的结构组成:1、机器人本体:焊接机器人的机器人本体是由伺服电机驱动,六个关节进行协调运动,提高了焊接的灵活度,精确地保证机械手的运动精度以及运动轨迹。2、焊接电源:焊接机器人需要具备单独的电源,这样设备启动的时候不会出现电压电流负荷的情况,保护全自动焊接机器人本体不受损害。3、控制系统。控制系统是焊接机器人的重要组成部分,相当于人类的大脑,可以发出控制指令,控制柜中具备输入和输出功能,现阶段焊接市场中的焊接机器人采用的是离线编程,操作人员需要将编程程序以及辅助设备程序输入到控制系统中。广东全自动机器人焊钳公司
机器人焊钳相较于传统焊钳,具有众多***优势。首先,机器人焊钳的焊接精度更高。它能够精确控制焊接参数...
【详情】然而,性价比是选择机器人焊钳时需要综合考虑的重要因素。虽然价格是一个重要的考虑因素,但不能**根据价...
【详情】此外,机器人焊钳的电极设计和维护也对焊接质量有着重要影响。电极的形状、材质和表面状态直接影响着电...
【详情】在现代焊接领域,机器人焊钳与传统焊钳各自有着独特的工作原理,这些差异决定了它们在不同场景下的应用...
【详情】安全操作:在使用机器人焊钳时,需要注意安全操作。操作人员需要穿戴好防护装备,如手套、护目镜等。同时,...
【详情】电流的精确控制同样是影响焊接质量的关键因素。机器人焊钳采用先进的焊接电源和智能控制系统,能够根据不同...
【详情】###机器人焊钳压力控制的稳定性保障 机器人焊钳的压力控制不仅要实现精细调节,更要保障其稳...
【详情】机器人焊钳是一种先进的焊接设备,具有以下特点:1.高效焊接:机器人焊钳能够精确地控制焊接过程,提高焊...
【详情】机器人焊钳的节能环保特点主要体现在以下几个方面:1.高效节能:机器人焊钳采用先进的电控系统,能够精确...
【详情】