机器人系统的组成机器人主体结构:机器人主体结构主要由机器人本体、机器人控制柜、机器人控制面板组成。机器人控制面板:机器人控制面板,主要担负这人机对话的作用,我们对机器人的调试、操作、编程、校正等,均靠机器人控制面板来执行。机器人本体构成:机器人本体主要由手臂、手腕、平衡缸、连接臂、旋转台、底座组成;当然,如果其他类型的机器人会有相应的差异,我们这里主要以六轴机器人作为案例进行说明。机器人的轴数分类:1轴、2轴、3轴为主轴,4轴、5轴、6轴为腕部轴;我们这里是以六轴机器人作为案例说明,当然还有3轴、4轴等机器人就不在细说。机器人工作区域:机器人的工作区域是指,机器人在工作时,所可能需要运动的三维空间区域该工作区域内不能有固定障碍物或者机器人工作时进入临时障碍物,阻挡机器人的工作路径。
机器人焊接系统应用在汽车行业车身侧围线焊接中,国内机器人系统就选明光利拓智能科技有限公司!浙江搬运机器人系统值得信赖

机器人系统的视觉应用:在生产线上,人来做此类测量和判断会因疲劳、个人之间的差异等产生误差和错误,但是机器却会不知疲倦地、稳定地进行下去。一般来说,机器视觉系统包括了照明系统、镜头、摄像系统和图像处理系统。对于每一个应用,我们都需要考虑系统的运行速度和图像的处理速度、使用彩色还是黑白摄像机、检测目标的尺寸还是检测目标有无缺陷、视场需要多大、分辨率需要多高、对比度需要多大等。从功能上来看,典型的机器视觉系统可以分为:图像采集部分、图像处理部分和运动控制部分。湖北码垛机器人系统销售公司汽车内饰件表面植绒设备,机器人系统就选明光利拓智能科技有限公司!

焊接机器人系统在汽车生产中应用焊接机器人目前已应用在汽车制造业,汽车底盘、座椅骨架、导轨、消声器以及液力变矩器等焊接,尤其在汽车底盘焊接生产中得到了普遍的应用。用这种技术可以提高焊接质量,因而甚至试图用它来代替某些弧焊作业。在短距离内的运动时间也大为缩短。国内生产的桑塔纳、帕萨特、别克、赛欧、波罗等后桥、副车架、摇臂、悬架、减振器等轿车底盘零件大都是以MIG焊接工艺为主的受力安全零件,主要构件采用冲压焊接,板厚平均为1.5~4mm,焊接主要以搭接、角接接头形式为主,焊接质量要求相当高,其质量的好坏直接影响到轿车的安全性能。应用机器人焊接后,提高了焊接件的外观和内在质量,并保证了质量的稳定性和降低劳动强度,改善了劳动环境。
工业机器人系统:机器人是一种具有“柔性”的机器,机器人具有人或者生物的某些功能,例如,工业机器人操作手模拟了人类手臂的功能,步行机器人模拟了人和动物下肢的运动功能。高级的机器人可以通过传感器了解外部环境或者“身体内在的”状态与变化,甚至可以做出自己的逻辑推理、判断与决策,也就是所谓的机器人的智能行为。工业机器人只有作为作业系统的一部分才能发挥作用。由于各种不同类型的机器人不断涌现,它们发挥作用的形式和组成的系统也在不断变化。工业机器人作为制造系统的一部分发挥作用是非常典型的。机器人焊接系统应用在机器人点焊焊接设备中,国内机器人系统就选明光利拓智能科技有限公司!

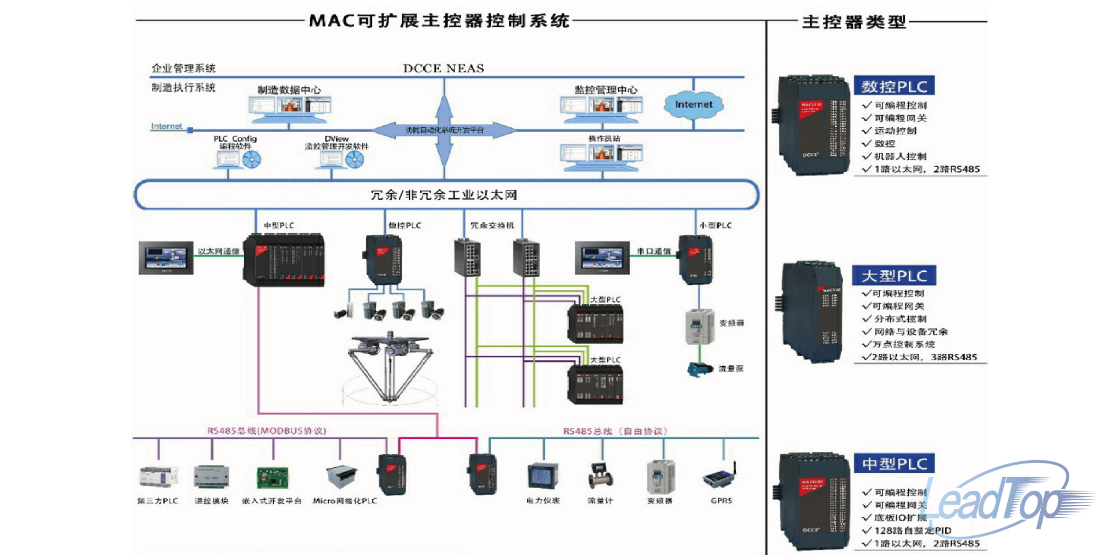
机器人系统之PLC触摸屏:PLC触摸屏的主要功能是:手动更改PLC信号输出,实现手动调整设备中由PLC控制的机构或设备的运行状态。在设备中,除工具快换装置的控制和末端工具本身动作的控制以外,其余机构或设备的运行均由PLC进行控制。PLC定义和优点。PLC可编程控制器,是(ProgrammableLogicalcontroller)的缩写,可编程式控制系统是由传统继电器电路所衍生的一种控制系统,与个人计算机的PC相区别,用PLC表示。PLC引入了微电子技术、计算机技术、自控等技术;具有通用性强、使用方便、适应面广、可靠性高、抗干扰能力强、编程简单等特点;体积小、成本低;具有自诊断功能,程序除错与维护容易;多样化I/O模块选择,扩充容易。机器人喷粉设备,机器人系统就选明光利拓智能科技有限公司!江西搬运机器人系统销售公司
智能物流搬运系统为企业节省人力,连线生产,提高生产效率,机器人系统就选明光利拓智能科技有限公司!浙江搬运机器人系统值得信赖
工业机器人系统中驱动系统的作用是什么:驱动系统是驱使工业机器人机械臂运动的机构。按照控制系统发出的指令信号,借助动力元件使机器人运行起来,给各个关节即每个运动自由度安装传动装置,这就是驱动系统。其作用是提供机器人各部委、各关节动作的原动力。根据驱动源的不同,驱动系统可分为电动、液压、气动三种也包括把它们结合起来应用的综合系统。驱动系统可以与机械系统直接相连,也可通过同步带、链条、齿轮、谐波转动装置等与机械系统间接相连。运动精度不高、重负载或有防爆要求的机器人采用液压、气压驱动,工业机器人大多采用电气驱动,而其中属交流伺服驱动应用普遍,且驱动器布置大都采用一个关节一个驱动器。浙江搬运机器人系统值得信赖
工业机器人系统中机械结构系统的作用是什么:机械结构系统又称操作机或执行机构系统,是机器人的主要承载体,它由一系列连杆、关节等组成。机械系统通常包括机身、基座、手臂、手腕、关节和未端执行器,每一部分都具有多自由度,构成一个多自由度的机械系统。1.机身部分:如同机床的床身结构一样,机器人的机身构成机器人的基础支撑。有的机身底部安装有机器人行走机构,便构成行走机器人:有的机身可以绕轴线回转,构成机器人的腰;若机身不具备行走及回转机构,则构成单机器人臂。2.基座:它是机器人的基础部分,起支撑作用。整个执行机构和驱动装置都安装在基座上。对固定式机器人直接连接在地面基础上,对移动式机器人,则安装在移动机构...
- 北京搬运机器人系统大概多少钱 2026-04-10
- 江西搬运机器人系统供应商家 2026-04-09
- 天津销售机器人系统创新服务 2026-04-09
- 江西MES机器人系统服务电话 2026-04-09
- 天津通用机器人系统技术指导 2026-04-09
- 湖北搬运机器人系统厂家 2026-04-09
- 北京码垛机器人系统 2026-04-09
- 天津工业机器人系统诚信经营 2026-04-09
- 江西MES机器人系统大概多少钱 2026-04-09
- 安徽取件机器人系统销售 2026-04-09



- 江西通用机器人系统值得信赖企业 2026-04-08
- 江西MES机器人系统咨询报价 2026-04-08
- 口碑好机器人系统哪里买 2026-04-08
- 天津MES机器人系统哪家比较好 2026-04-08
- 湖北销售机器人系统信誉保证 2026-04-08
- 湖北口碑好机器人系统值得推荐 2026-04-08




- 码垛全自动生产线设计方案 04-28
- 零部件全自动生产线诚信合作 04-28
- 湖北零部件全自动生产线供应商 04-28
- 浙江装配全自动生产线设备 04-28
- 山西N95口罩机全自动生产线设备 04-28
- 浙江工业全自动生产线价格 04-28
- 广东注塑全自动生产线方案 04-28
- 天津机器人全自动生产线设备 04-28
- 北京平面口罩机全自动生产线供应商 04-27
- 吉林全自动生产线诚信合作 04-27