在应用兼容性方面,三维扫描技术需要适应各种不同的应用场景和需求。例如,在工业制造领域,三维扫描技术需要与支持CAD、CAM等软件的协同工作,以实现产品设计和制造的精确对接。在建筑领域,三维扫描技术则需要与BIM(建筑信息模型)等系统进行集成,实现建筑设计和施工过程的数字化管理。此外,在文化遗产保护、医学诊断、地形测绘等领域,三维扫描技术也需要与相应的专业软件和系统进行兼容。之后,兼容性研究还需要关注三维扫描技术的标准化和规范化问题。通过制定统一的标准和规范,可以确保不同厂商的三维扫描设备在数据格式、接口协议等方面具有一致性,从而提高设备的互操作性和兼容性。同时,标准化和规范化也有助于推动三维扫描技术的普及和应用。三维扫描技术的兼容性研究是一个涉及硬件、软件和应用等多个方面的综合性课题。通过加强兼容性研究,可以推动三维扫描技术与其他系统和软件的协同工作,拓展其应用范围,提高其在各个领域的应用价值。无论是科研实验还是产品设计,三维扫描仪都能为创新提供有力支持。3d建模三维扫描仪精度
三维扫描仪(3Dscanner)的原理主要基于光学、激光或结构光等技术,通过捕捉物体表面的几何形状和纹理信息,实现对物体的三维建模或数字化重建。光学原理:主要基于相机成像,通过摄像机的投影将物体表面从不同视角拍摄下来。然后,计算机会对这些不同视角的图像进行配准,并提取出每个像素点的空间坐标,终形成三维点云。这种方法在处理闪亮(高反照率)、镜面或半透明的表面时可能会遇到困难。激光原理:利用激光器发出的激光束照射到物体表面,激光束被物体反射或散射后由接收器接收。接收器通常是一个光电元件,能够检测到激光的强度和时间信息。通过分析这些信息,可以计算出物体表面的三维坐标。辽宁三维扫描仪保养三维扫描仪能够实现对透明物体的扫描,拓展了其应用场景和范围。

三维扫描仪的应用场景非常较宽,主要得益于其能够精确、快速地获取物体表面的三维数据。工业设计与制造:设计师和工程师可以利用三维扫描仪获取产品原型或现有零部件的三维数据,用于逆向工程、产品改进和制造过程中的质量控制。此外,三维扫描技术还可以用于模具设计和制造,以及精密零部件的尺寸检测。文化遗产保护:在文博领域,三维扫描仪可以对珍贵文物进行非接触式的三维数字化采集,有效保护文物并避免物理接触可能带来的损害。同时,通过构建3D虚拟展馆,实现文物展陈实景浏览和虚拟沉浸体验,为文博产业提供全新的展示方式。建筑设计与施工:在建筑领域,三维扫描仪可以快速获取建筑物或地形的三维数据,用于建筑测量、古迹保护、遗址测绘以及施工监测等。这些数据可以帮助建筑师和工程师更准确地评估建筑状况,进行精确的设计和规划。
三维扫描仪的精度与其扫描出来的物体的大小并没有直接的关系。精度主要指的是扫描结果与实际物体之间的吻合程度,即扫描数据的准确性和细节捕捉能力。而扫描出来的物体的大小则取决于扫描物体本身的尺寸以及扫描时的设置和参数。高精度的三维扫描仪能够更准确地捕捉物体的形状、细节和表面特征,生成更精确的三维数据。这意味着扫描结果更接近于实际物体的真实形态,能够呈现出更多的细节和微小的变化。然而,这并不意味着扫描出来的物体会变得更大。无论扫描仪的精度如何,它都只是在记录物体的三维信息,而不会改变物体本身的大小。扫描物体的大小取决于物体本身的尺寸以及扫描时的设置。例如,如果扫描一个较小的物体,无论使用高精度还是低精度的扫描仪,扫描结果都会是一个较小的三维模型。同样地,如果扫描一个较大的物体,扫描结果将是一个较大的三维模型。因此,三维扫描仪的精度与扫描出来的物体的大小是两个不同的概念。选择适当的扫描仪和设置,可以根据需要获得精确且与实际物体尺寸相匹配的三维模型。通过三维扫描仪获取的数字模型,可以方便地进行编辑、修改和优化。

三维扫描仪的原理主要是利用光学、激光或结构光等技术来捕捉物体表面的几何形状和纹理信息,进而实现对物体的三维建模或数字化重建。具体来说,三维扫描仪通过投射特定的光模式(如激光或结构光)到物体表面,并观察光模式在物体表面上的变形或反射。随后,设备中的相机或传感器会捕捉这些光模式的变化,并将其转化为数字信号。这些数字信号经过计算机处理,可以提取出物体表面的三维坐标信息。在扫描过程中,为了确保数据的准确性,三维扫描仪会采用特定的算法和技术对采集到的数据进行配准和校准。配准是将从不同视角或位置获取的数据进行对齐,以形成一个完整的三维模型;校准则是纠正扫描过程中可能产生的误差或畸变。终,经过数据处理和重建,三维扫描仪可以生成物体的三维模型。这些模型可以以点云、网格或实体形式表示,并可以用于各种应用,如工业设计、质量检测、虚拟现实、文化遗产保护等。在文物保护领域,三维扫描仪为文物修复和复制提供了强有力的技术支持。河南三维扫描仪检修
三维扫描仪的普及和应用推动了数字化时代的快速发展和进步。3d建模三维扫描仪精度
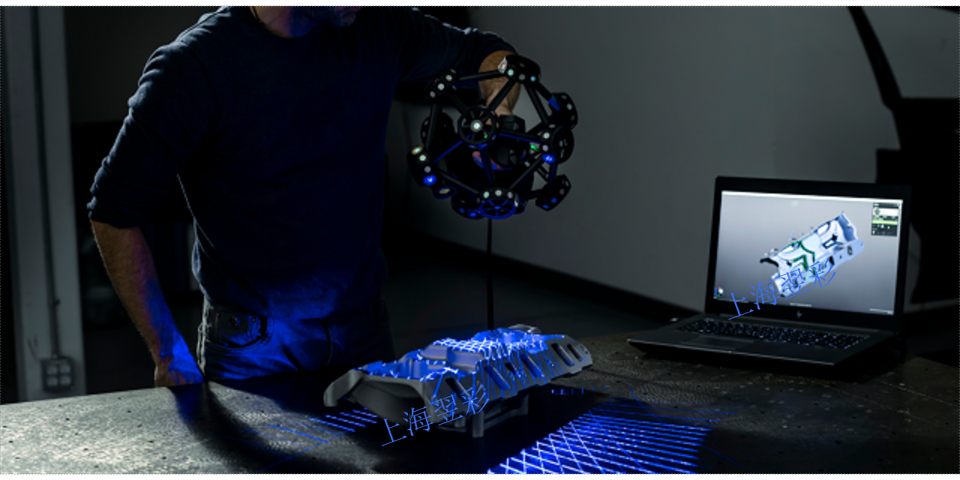
结构光扫描原理:投射结构光:使用线光源产生狭窄的激光平面(如宽度小于0.4mm)或其他结构光模式,并将其投射到被扫描物体表面。捕获变形光:当结构光照射到物体表面时,其形状会随物体表面的形状而发生变形。摄像机捕捉这些变形的光模式。提取三维信息:通过分析捕获到的变形光模式,可以提取出物体表面的三维信息。结构光测距技术利用照明光源中的几何信息帮助提取景物中的几何信息,从而快速、准确地获取三维数据。数据处理与重建:空间位置确定:三维扫描仪通常还使用固定在被检测物体表面的视觉标记点来确定扫描仪在扫描过程中的空间位置。这些空间位置信息用于空间位置转换,确保获取的三维信息的准确性。3d建模三维扫描仪精度