智能光伏清洁机器人的优点及特点:行走驱动装置采用模块化设计,由大功率直流电机驱动,具有较强的地形适应性。适用于各种规格的光伏组件。光伏组件安装平整度低;内置大容量低温动力锂电池,完整的充电控制电路和智能电源管理程序,确保各种终端的正常运行;自带光伏发电系统和清洁装置,安装很方便,射程远,可清洁2000米光伏组件;IP65防水结构设计,耐高低温、耐雨、耐酸雾;技术和机械结构设计,能承受12级强风;光伏设备清扫机器人,详情请欢迎咨询。搭载监控摄像机来进行供电及图像传输,加装上环境监控系统。天津光伏清洗机器人厂家

光伏有三种清洁方式:人工清洁、水车清洁和机器人清洁。人工清洁的特点:很难找到人工工作,很难管理,效率低,时间长。清洁过程影响发电,清洁质量难以保证,运行中存在安全风险和较大损失。水车清洗:清洗范围有限,适用于空间充足、车辆自由进出的地面电站。它对屋顶光伏板、沙漠电站或紧密布置的电站无能为力;机器人清洗:定期清洁,增加发电量,夜间工作,不影响发电,效率是人工清洁的50倍以上,自供电,自储能,无外部能源,无人值守,智能控制,无水清洁,无水资源。广西智能清洗机器人费用它可以适应不同地区的环境条件和季节的变化,保持光伏板的工作状态。

关于数据传输:光伏清扫机器人系统配2个数据传输模块,用于机器人本体、摆渡车、服务器之间的传输,本体安装物联网卡用于云平台及本地服务器的网络通信;关于机器人数量:光伏清扫机器人应用在电站中,根据方阵的布局,设计停机架、桥接、摆渡车等辅助性结构,并确定机器人清扫范围和机器人数量;关于控制系统:配套光伏清扫机器人管理系统,提供云端部署和管理使用权限;支持提供管理系统项目本地内网服务器部署;提供光伏清扫机器人管理系统软件接口文件,可支持与其他平台的数据对接。
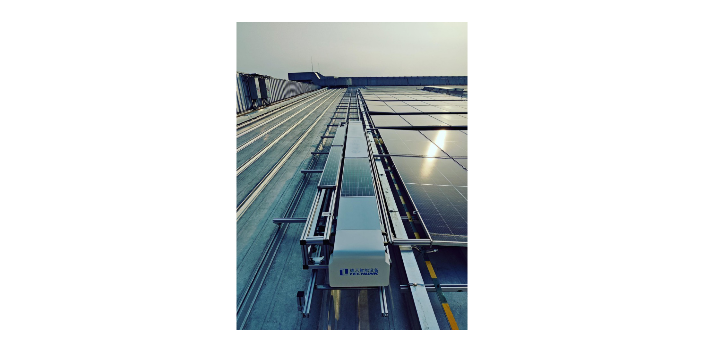
大型地面电站清洗模式针对大型地面电站应用,一台摆渡车机器人可搭载多台清洁机器人,摆渡车机器人在各阵列间转移清洁机器人,解决了清洁机器人跨行列工作的问题,实现了机器人的比较大化利用,昼夜均可自动运行,日清洗力达5MWp。针对分布式屋顶电站装机容量相对较小的特点,也可以采用摆渡车机器人,一台清扫机器人搭配一台摆渡车,可以时间光伏电站的多排清扫,远程控制,无需人工介入,人工1天的工作量,机器人1小时就可以搞定了。
根据规模和功能需求测算,部署一台机器人清洗项目整体时长需约15日。

机械化清洗车清洗机械化清洗车清洗,即是辅助用清洗车在光伏太阳能板行与行之间进行清洗,冲刷。相对于前两种清洗方式,这种机械化清洗车清洗方式的确在人工上省了很多,但是要求间距大且设备大而笨重,同时清洗起来,也不均匀。清扫机器人进行清扫清洗光伏太阳能板,省去人工、节约水资源的同时,也解决了因清洗车设备大、笨重而带来的局限性,如清洗均匀等问题。清洁机器人清洗方式,省时省力,可遥控或者后台操作,自定义清洗时间;不过,不好的地方就是很难将顽固的污渍清洗干净。智能清扫机器人还可以实现自动跨越障碍或自动“爬坡”,确保清洁效力。江西光伏智能清洗机器人哪家好
搭载监控摄像机进行供电及图像传输,加装上环境监控系统。天津光伏清洗机器人厂家
定性定量另一种分类发展前景预测的分类方法般可以分为定性预测和定量预测两大类。
对于企业营销管理人员来说,应该了解和掌握的企业预测方法主要有:(1)定性预测、法定性预测法也称为直观判断法,是光伏板清扫机器人发展前景预测中经常使用的方法。
定性预测主要依靠预测人员所掌握的信息、经验和综合判断能力,预测市场未来的状况和发展趋势。这类预测方法简单易行,特别适用于那些难以获取***的资料进行统计分析的问题。因此,定性预测方法在光伏板清扫机器人发展前景预测中得到***的应用。定性预测方法又包括:会议法,德尔菲法,销售人员意见汇集法,顾客需求意向调查法。 天津光伏清洗机器人厂家