电力电子算法评估有助于推动算法的创新和发展。通过对不同算法进行比较和分析,我们可以发现各种算法的优势和局限性,从而为算法的创新提供灵感和方向。例如,我们可以借鉴其他领域的优化算法,将其应用于电力电子领域,以拓展电力电子算法的应用范围;我们还可以针对电力系统的特定需求,设计具有针对性的新算法,以满足电力系统的优化调度需求。这些创新性的算法不仅能够提高电力系统的运行效率,还能够推动电力电子技术的不断进步和发展。电力电子算法评估的另一个重要优点在于提升系统的稳定性。电力系统的稳定性是保障电力供应安全的关键因素。通过电力电子算法评估,我们可以选择性能稳定、适应性强的算法来应用于电力系统的优化调度中。快速原型控制器具备强大的数据处理能力,能够实时处理大量的控制数据,确保控制精度的同时提高工作效率。电机控制算法评估设计
快速原型控制器在工业控制场合中的应用——电机是工业控制场合中常见的被控对象之一。快速原型控制器可以应用于电机的速度控制、位置控制等场景。通过实时接收电机的反馈信号,如转速、位置等,并根据控制算法计算出相应的控制信号,实现对电机的精确控制。这种控制方式不仅提高了电机的控制精度和稳定性,还降低了能耗和维护成本。在机器人控制领域,快速原型控制器也发挥着重要作用。机器人控制系统需要实现复杂的运动轨迹规划和实时控制。快速原型控制器能够实现对机器人运动学、动力学等模型的快速构建和仿真测试,帮助开发者验证和优化控制算法。同时,通过与实际机器人的实时连接,快速原型控制器还可以对机器人的运动轨迹进行精确控制,提高机器人的运动性能和稳定性。南宁基于模型开发快速原型控制器能够降低开发成本,减少不必要的资源浪费,提高整体效益。

高精度快速原型控制器具有易于部署的优点。通过控制算法的直接部署,工程师们无需过多关注底层硬件的细节,从而减轻了底层开发的负担。此外,控制器还提供了丰富的接口和驱动程序,使得与其他设备的连接变得更为简单和便捷。这种易于部署的特性使得高精度快速原型控制器在多个项目中得到了普遍应用。无论是工业自动化生产线上的机器人控制,还是航空航天领域的飞行器导航,都可以看到这种控制器的身影。高精度快速原型控制器具备实时监测和在线调参的功能。工程师们可以通过控制器提供的实时监测界面,实时查看控制算法的运行状态和效果,从而及时发现并解决问题。同时,在线调参功能使得工程师们可以根据实际情况对控制参数进行灵活调整,以达到较佳的控制效果。这种实时监测和在线调参的便利性提高了控制系统的稳定性和可靠性。工程师们可以更加准确地控制被控对象的行为,实现更加精确和高效的控制。
高灵活快速原型控制器具备高精度和高稳定性的优点。控制器采用先进的控制算法和精确的控制策略,能够实现对执行机构的精确控制,从而提高产品的制造精度和质量。同时,控制器还具备强大的抗干扰能力,能够在复杂多变的工作环境中保持稳定的性能,确保生产过程的可靠性和稳定性。这种高精度和高稳定性的特点使得高灵活快速原型控制器在制造业中得到了普遍的应用。高灵活快速原型控制器还具有易于集成和维护的特点。控制器采用了标准化的接口和通信协议,可以方便地与其他设备和系统进行集成。同时,控制器还提供了丰富的故障诊断和报警功能,使得用户能够及时发现和处理设备故障,降低维护成本。此外,控制器的模块化设计使得维护和升级变得更加简单方便,提高了设备的可维护性和可靠性。高效率快速原型控制器具有一键生成代码的功能。

快速控制原型(RCP)产品的适用性——在控制器的研发和生产中,传统基于DSP芯片自制PCB控制板的开发方式存在周期长,自制硬件可靠性差等问题。利用快速控制原型这样高效的研发工具,可以减少用户研发或学习阶段在代码转译、硬件定制、调试等方面花费的时间。通过快速控制原型仿真器将算法快速下载实现后,即可控制实际对象联调与测试。相比于传统在离线数字仿真后,将算法通过C语言下载到控制板的方式,RCP的方法有如下优势——易于部署:控制算法直接部署,减少底层开发负担。易于联调:实时监测、在线调参,快速发现控制算法中存在的问题。灵活性高:平台性能强,资源丰富,能够满足多个项目的研发需求。快速原型控制器采用高性能硬件平台,能够支持复杂控制任务,满足高性能要求。仿真实训系统要多少钱
快速原型控制器凭借其独特的优势,在多个科研得到了普遍应用。电机控制算法评估设计
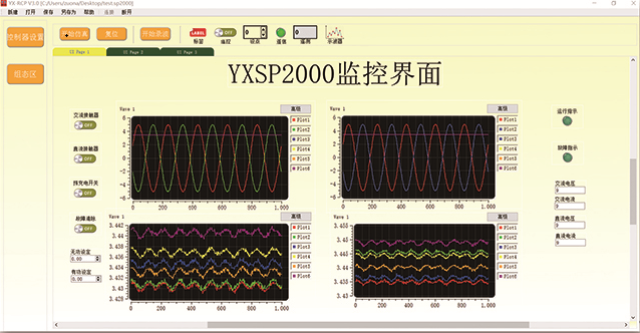
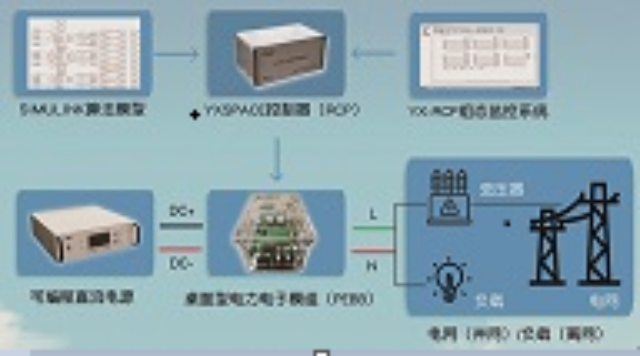
快速原型控制器能够将用户设计的图形化的高级语言编写的控制算法(Simulink)转换成DIDO、AIAO量,完成实际硬件控制。控制算法模型一般采用Matlab中的Simulink工具搭建,将模型中的接口与硬件驱动接口绑定后,再结合TI公司的CCS编译工具产生可执行文件,下载至YXSPACE控制器中运行。快速原型控制器主要用于配置YXSPACE控制器工作模式,同时可以实时监测控制过程中的各类运行量,包括采集量、中间控制变量等。YXSPACE-VIEW2000包括了6类组态控件,分别为遥控控件、遥信控件、遥调控件、遥测控件、示波器控件以及文字编辑控件等。用户可以借助这些控件,直观、方便的搭建监控界面,监控控制器内部运行的详细信息。电机控制算法评估设计