高精度快速原型控制器采用了先进的快速控制原型技术,将传统控制器设计的彼此分离的阶段进行了一体的整合。在一体环境中,工程师可以完成控制法则的设计及模拟、控制模型的程式码生成等工作,从而有效地解决了传统控制器设计周期长、效率低下的问题。这种一体化的设计方式缩短了研发周期,提高了研发效率。工程师们无需再花费大量时间在代码转译、硬件定制、调试等方面,而是可以直接通过快速控制原型仿真器将算法快速下载实现,控制实际对象进行联调与测试。这不仅减少了研发成本,还提高了产品的市场竞争力。高可靠快速原型控制器具有灵活可定制的硬件接口,组态化监控软件界面。基于模型开发企业
快速控制原型(RCP)产品的适用性——在控制器的研发和生产中,传统基于DSP芯片自制PCB控制板的开发方式存在周期长,自制硬件可靠性差等问题。利用快速控制原型这样高效的研发工具,可以减少用户研发或学习阶段在代码转译、硬件定制、调试等方面花费的时间。通过快速控制原型仿真器将算法快速下载实现后,即可控制实际对象联调与测试。相比于传统在离线数字仿真后,将算法通过C语言下载到控制板的方式,RCP的方法有如下优势——易于部署:控制算法直接部署,减少底层开发负担。易于联调:实时监测、在线调参,快速发现控制算法中存在的问题。灵活性高:平台性能强,资源丰富,能够满足多个项目的研发需求。西宁SIMULINK模型自动生成代码快速原型控制器具备强大的数据处理能力,能够实时处理大量的控制数据,确保控制精度的同时提高工作效率。
快速控制原型控制器具有易于部署的优点。传统的控制器开发方式需要开发人员手动编写底层代码,进行硬件定制和调试,工作量巨大且容易出错。而基于DSP的快速控制原型控制器则通过高级语言(如Matlab/Simulink)进行算法设计,自动生成代码并下载到DSP中运行,简化了开发过程。同时,该控制器还支持实时监测和在线调参,使得开发人员能够快速发现控制算法中存在的问题并进行优化。基于DSP的快速控制原型控制器具有高度的灵活性和可扩展性。由于DSP具有丰富的外设接口和强大的通信能力,它可以轻松地与各种传感器、执行器和其他外部设备进行连接和通信。这使得控制器能够适应不同的应用场景和需求,实现多种功能的集成和扩展。此外,DSP的快速原型控制器还支持多项目并行开发和资源共享,提高了研发效率。
人工智能快速原型控制器通过引入先进的算法和模型,实现了对控制对象的快速响应和精确控制。与传统的控制器相比,它能够在更短的时间内对控制信号进行响应,并准确地调整控制参数,以达到较佳的控制效果。这种快速响应和精确控制的特点使得人工智能快速原型控制器在需要高速度和高精度控制的场合中表现出色,如高速生产线、精密加工设备等领域。人工智能快速原型控制器具有强大的自适应性和鲁棒性。它能够通过学习和优化算法,自动适应控制对象的变化和干扰,保持稳定的控制效果。在控制过程中,即使面对未知的环境或控制对象的动态特性变化,它也能快速适应,并通过自我调整来保证控制精度和稳定性。高可靠快速原型控制器具有高度的灵活性,能够轻松适应不同的控制需求。

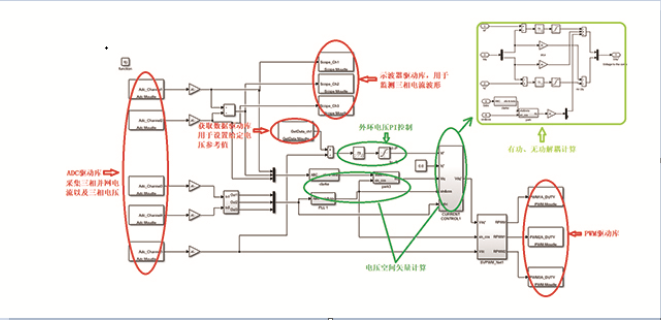
电力电子算法评估有助于推动算法的创新和发展。通过对不同算法进行比较和分析,我们可以发现各种算法的优势和局限性,从而为算法的创新提供灵感和方向。例如,我们可以借鉴其他领域的优化算法,将其应用于电力电子领域,以拓展电力电子算法的应用范围;我们还可以针对电力系统的特定需求,设计具有针对性的新算法,以满足电力系统的优化调度需求。这些创新性的算法不仅能够提高电力系统的运行效率,还能够推动电力电子技术的不断进步和发展。电力电子算法评估的另一个重要优点在于提升系统的稳定性。电力系统的稳定性是保障电力供应安全的关键因素。通过电力电子算法评估,我们可以选择性能稳定、适应性强的算法来应用于电力系统的优化调度中。快速原型控制器能够在模型中调用驱动模块,就可以将模型与硬件对应起来。变流器算法评估厂商
快速原型控制器具备节能环保的特性,能够有效降低能源消耗,符合绿色发展趋势。基于模型开发企业
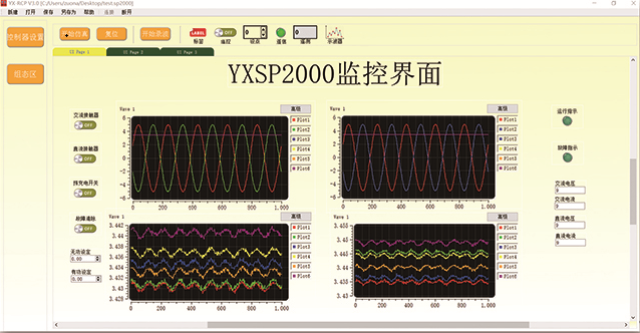
RCP的主要功能在于其能够快速地验证控制算法的有效性。通过将用图形化高级语言编写的控制算法下载到原型控制器上,科研人员可以迅速在实际环境中测试算法的性能,无需长时间等待嵌入式芯片上的算法实现。这种快速的验证过程缩短了研发周期,使得科研人员能够更快地识别并解决潜在问题,加速成果的产出;RCP使用实时硬件来运行Simulink控制算法,控制真实被控对象,如开关、电磁阀、电机、发动机等。这种集成方式使得科研人员能够在开发初期就进行实际测试,验证控制算法在实际环境中的表现。由于被控对象是真实的,因此验证结果更具可靠性和实用性。基于模型开发企业