实时半实物仿真系统的一个明显优点是降低成本。传统的测试方法往往需要大量的实验室设备、场地和人员,而实时半实物仿真系统则可以通过计算机模拟来替代部分实物测试,从而减少了对实物资源的需求。这不仅降低了测试成本,还节约了宝贵的资源。实时半实物仿真系统还能有效减少测试中的物料消耗和能源消耗。通过模拟测试,可以减少对实物的损坏和浪费,从而降低测试过程中的物料成本。同时,由于仿真测试主要依赖计算机进行计算和模拟,因此能源消耗也相对较低,有助于实现绿色、环保的测试过程。快速原型控制器在安全性方面也经过了严格的测试和验证。电力电子半实物仿真平台结构

变流器算法的复杂性直接影响其实现难度和计算成本。在实际应用中,我们倾向于选择复杂度适中、易于实现的算法。同时,实时性也是评估算法性能的重要指标之一。良好的变流器算法应具备快速响应能力,能够在短时间内对电力系统中的变化做出准确反应。稳定性是评估变流器算法性能的关键因素。一个稳定的算法能够在各种工况下保持良好的性能,避免因参数变化或外部干扰而导致系统失控。因此,在设计和选择变流器算法时,我们需要充分考虑其稳定性问题,确保算法在各种条件下都能稳定运行。贵州高稳定快速原型控制器快速原型控制器具备强大的数据处理能力,能够实时处理大量的控制数据,确保控制精度的同时提高工作效率。
RCP系统提供了一系列实用工具,方便用户在实际测试过程中进行快速的调试分析。这些工具可以帮助用户快速定位并解决问题,减少在软硬件调试上花费的时间。此外,通过隔离开发过程中的软硬件问题,RCP还能够提高开发效率,减少不必要的返工和修改;RCP平台具有高度的灵活性和可扩展性,能够满足多种项目的研发需求。用户可以根据项目的具体要求,选择合适的硬件配置和软件工具,构建符合需求的快速原型控制器。此外,随着技术的不断进步和需求的不断变化,RCP平台还能够进行升级和扩展,以适应新的应用场景和更高的要求。
快速原型控制器的工作原理主要基于其硬件和软件系统的协同作用。硬件系统包括主板、通讯接口、电源管理和运算器等主要部件,为控制器提供强大的计算能力和稳定的工作环境。软件系统则包括操作系统、控制界面和运动控制程序等,负责实现各种控制算法和界面交互功能。在实际应用中,用户首先通过设计软件将产品的设计思想转化为数字模型,然后将模型导入到快速原型控制器中。控制器根据预设的控制算法和参数,对硬件设备进行精确控制,实现产品的快速原型制造。同时,控制器还可以通过实时监测和反馈机制,对制造过程进行优化和调整,确保原型产品的质量和性能达到设计要求。快速原型控制器采用标准化接口和协议,能够与其他标准设备或系统进行互操作,提高系统兼容性。

电机控制算法在降低能耗方面具有明显优势。通过精确控制电机的转速和转矩,减少不必要的能量损失;通过优化电机的启动和加速过程,降低启动能耗;通过实现电机的无级调速,使电机在不同负载下都能保持较佳的运行效率。这些措施可以有效降低电机的能耗,提高能源利用效率。电机控制算法的精确控制使得电机在启动、加速、减速和停止等过程中都能保持较高的效率。这有助于提高生产线的运行速度,减少生产过程中的等待时间,从而提高生产效率。此外,电机控制算法的故障诊断功能可以在电机出现故障时及时发出警报,便于维修人员快速定位并解决问题,减少生产线的停机时间。高可靠快速原型控制器具备代码一键生成、算法高效迭代、性能快速评估。硬件在环仿真系统特点
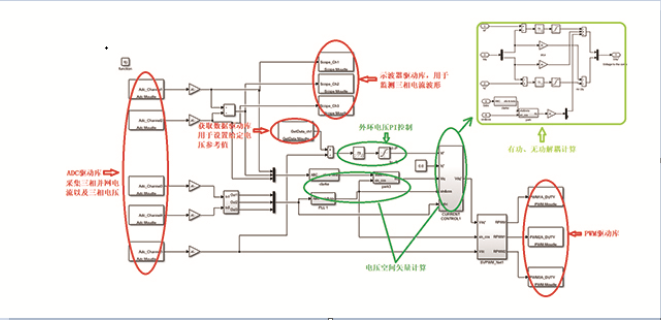
快速原型控制器能够在模型中调用驱动模块,就可以将模型与硬件对应起来。电力电子半实物仿真平台结构
智能化快速原型控制器采用模块化设计,支持多种编程语言和开发工具,使得用户可以根据实际需求进行灵活的编程和定制。用户可以通过简单的编程操作,实现对控制器的参数设置、功能扩展和性能优化,从而满足不同的控制需求。此外,智能化快速原型控制器还具备强大的扩展性,可以通过添加功能模块或与其他设备进行连接,实现更加复杂和高级的控制功能。这种灵活性使得控制器能够适应不同的应用场景和变化的需求,为用户的创新提供了广阔的空间。智能化快速原型控制器通过精确的控制算法和先进的传感器技术,能够实现高精度的控制。在制造过程中,控制器可以精确控制设备的运动轨迹、速度和加速度等参数,确保产品加工的准确性和一致性。这种高精度控制有助于提升产品的质量和性能,满足用户对品质高产品的需求。电力电子半实物仿真平台结构