AGV/AMR充电节拍怎么计算:
1.**确定AGV的工作时间**:记录AGV在没有充电的情况下能够连续工作的时间长度。
2.**了解AGV的电池容量**:获取AGV电池的总容量,通常以安时(Ah)为单位。
3.**测量AGV的能耗**:计算AGV在单位时间内的能耗,这可以通过电池的放电率来估算。
4.**计算充电时间**:根据AGV的电池容量和充电机的输出功率来计算完全充电所需的时间。如果充电机的输出功率已知,可以使用以下公式:充电时间=耗电电量/充电电流
5.**考虑充电效率**:实际充电时间可能因为充电效率(通常小于100%)而有所不同。充电效率可以由制造商提供或通过实际测试获得。
6.**确定充电周期**:基于AGV的使用模式,确定何时进行充电。例如,如果AGV在晚上不工作,可以选择在这段时间内进行充电。
7.**计算充电节拍**:充电节拍是指AGV完成一次工作任务后返回充电站进行充电的频率。如果AGV的工作时间和充电时间已知,可以计算AGV在一天内需要充电的次数,从而确定充电节拍。
8.**优化充电策略**:根据AGV的工作模式和任务需求,可能需要优化充电策略以减少充电次数和提高效率。例如,可以在AGV的低峰时段进行充电,或者使用快速充电技术。 换电池充电:适用于对工作效率有极高要求的场景,通过快速更换电池组实现不间断作业。青岛侧充一体机充电机
霍克充电机CAN通讯介绍
1.CAN报文结构:CAN报文由ID(标识符)、数据帧等组成,主要关注报文ID、数据内容、发送周期。例如,直流充电网的报文结构包括序号、控制字、数据长度、数据包个数、预留字节、PGN(报文组号)等。
2.通信标准:CAN物理层规定了充电机与BMS之间通信的接口、电气特性和传输速率等要求。推荐使用250kbit/s的传输速率,并且使用符合ISO11898-1:2003标准的屏蔽双绞线接口。
3.CAN帧格式:CAN帧格式由起始位、仲裁域、数据域、控制域和结束位组成。每个CAN帧包含一个PDU(协议数据单元),PDU由优先权、保留位、数据页、PDU格式、PDU特定、源地址和数据域组成。
4.通信流程:充电机与BMS的CAN通信包括充电握手阶段、参数配置阶段、充电阶段和充电结束。在握手阶段,BMS识别接入的是车载充电机还是直流充电桩,以选择对应的通信协议。充电阶段,BMS控制继电器闭合使主回路导通,实现电池组充电。安全监控帧处理确保了充电系统的安全性和可靠性。 REMA插头充电机官方霍克智能充电机是专为AGV(自动导引车)/AMR(自主移动机器人)应用精心打造的充电解决方案。

传统的充电机架构主要基于工频变压器及(可控硅相位调节)整流电路,这种设计虽在构造上显得直观简洁,但伴随而来的弊端不容忽视:
1.笨重不便:其庞大的体积和重量不仅增加了运输的难度,也在日常充电操作中带来了诸多不便。
2.保护机制匮乏:缺乏荃面而有效的保护机制,使得其在应对异常情况时的表现欠佳,安全性与稳定性有待提高。 3.人工干预频繁:充电过程中需要人工持续监控并调整充电电流,难以精确平衡蓄电池的充分充电与过充防护,这对操作人员的专业性和耐心提出了较高要求。
值得注意的是,蓄电池的过度放电、过度充电或长期充电不足,都会加速电池极板的老化过程,从而缩短蓄电池的整体使用寿命。因此,确保蓄电池在每次放电后都能得到及时且恰当的充电,对于延长其使用寿命至关重要。
鉴于上述问题,霍克推出了采用美国90年代末先进开关电源技术及智能充电技术的新型全自动充电机。这款充电机专为解决工频型充电机的不足而设计,旨在显筑延长蓄电池的使用寿命,并实现全程无人值守的全自动工作模式,尤其适用于需要远程监控或自动管理的充电环境。
霍克公司成功获得了ISO9001、ISO14001及COC质量管理体系的国际认证,同时,我们的产品也顺利通过了包括CE在内的多国安全规范认证,彰显了我们对品质与环境的双重承诺。在知识产权领域,我们高度重视并持续投入,迄今已拥有超过30项发明专利与软件著作权,不断巩固和拓展我们的技术壁垒。对于研发创新,我们持开放与无限支持的态度,已创造出20余项引铃行业的先进技术,推动行业向前发展。我们坚信,团队的成长是公司蕞宝贵的财富,因此,我们关爱每一位团队成员,秉持“分享与共同成长”的盒芯理念,携手共进。在此,我们衷心感谢长期以来陪伴我们的客户,与行业内超过200家客户的合作经历,是我们不断前进的动力源泉。我们始终坚守对品质的严格把控,并将“客户服务至上”作为不变的承诺。作为新能源行业的服务者,我们不断创新,致力于为客户创造更多的价值,共同推动新能源产业的繁荣发展。恒流充电模式:在电池电压上升到涓流充电阈值以上时,充电机提高电流进行恒流充电。

自动充电流程
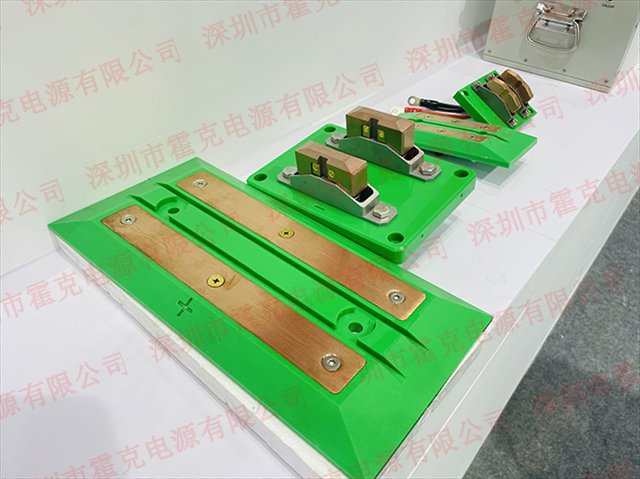
在AGV自动充电流程中,从电量监测到对接完成,每一步都精心设计以确保安全与效率。当AGV电量不足时,即向中控系统请求充电,并导航至充电站。充电桩配备灵活触头,利用电动推杆等机制精细移动。AGV抵达后,通过传感器与导引系统微调位置,确保触头精细对接。接触过程中,触头以安全速度靠近并轻触AGV接口,弹性设计适应微小偏差。电气连接一旦建立,即启动充电,同时系统验证连接稳固,确保电流稳定传输。充电期间,实时监测保障安全,遇异常即报警并断电。充电完毕后,触头自动分离并复位,AGV恢复待命。整个过程无需人工干预,不仅提升了充电效率,还大幅增强了作业安全性与自动化水平。该流程是AGV智能物流系统中不可或缺的一环,助力企业实现高效、可靠的无人化运作。 充电机输出充电电流值:DC10A、20A、30A、40A、50A、60A(可定制参数)。REMA插头充电机官方
AGV自动充电:电池充满后,AGV小车会断开充电回路,充电桩收回充电触头,AGV小车驶向工作区等待工作任务。青岛侧充一体机充电机
霍克充电站性能特点:
(1)采用工业级彩色触摸屏,实时显示充、放电参数和态,显示故信息,实时査看当前的工作曲线:并可读取曲线上各点的充电电流、电压、容量及时间。
(2)具有自动翻档功能,根据所接置电池电压,充放电机自动识别并切换主变压器次级档位和大功率电阳器对应档位,实现自动翻档功能,无须人员提作:
(3)对各类电池的充放电工艺程式及参数,用户可事先选择对应的充电曲线,曲线上各阶段参数可事先设置,也可在充,放电工作过程中在线设置或修改:充放电机将根据设置或修改参数自动完成整个充放电.
(4)对于用户设置的参数,系统可长久记忆,停电也不丢失:。对电网无相序要求,A、B、C三相输入可任意接线:。具有延时启动、软启动、软关断保护功能;·具有开路、接反、过流、过压、过热、电源缺相等的故障保护和报警功能·
(5)具有暂停功能:充放电过程可以暂停,重新启动后,延续暂停前状态继续充放电过程,确保充放电过程连续运行。
(6)具有复位功能,确保系统重新开始工作;。
青岛侧充一体机充电机