实时半实物仿真系统的一个明显优点是降低成本。传统的测试方法往往需要大量的实验室设备、场地和人员,而实时半实物仿真系统则可以通过计算机模拟来替代部分实物测试,从而减少了对实物资源的需求。这不仅降低了测试成本,还节约了宝贵的资源。实时半实物仿真系统还能有效减少测试中的物料消耗和能源消耗。通过模拟测试,可以减少对实物的损坏和浪费,从而降低测试过程中的物料成本。同时,由于仿真测试主要依赖计算机进行计算和模拟,因此能源消耗也相对较低,有助于实现绿色、环保的测试过程。YXSPACE能够将用户设计的图形化的高级语言编写的控制算法(Simulink)转提成DIDO、ALAO量。高稳定快速原型控制器企业
人工智能快速原型控制器具有模块化、标准化的设计特点,使得它易于与其他系统进行集成和扩展。用户可以根据实际需求,选择适合的控制器模块进行组合和配置,以满足不同控制系统的要求。同时,由于其标准化的设计,使得控制器之间的通信和数据交换变得更加简单和高效,提高了系统的整体性能和可靠性。人工智能快速原型控制器基于深度学习和神经网络等算法进行模型训练和优化。这使得它能够不断地学习和优化自身的控制策略,以更好地适应控制对象的变化和不确定性。与传统的控制器相比,它无需手动调整控制参数,而是能够通过自动学习来找到较优的控制策略,从而提高了控制效率和精度。高稳定快速原型控制器企业快速原型控制器能够实时监控系统状态,及时发现潜在问题并进行预警,提高系统安全性。

RCP系统提供了一系列实用工具,方便用户在实际测试过程中进行快速的调试分析。这些工具可以帮助用户快速定位并解决问题,减少在软硬件调试上花费的时间。此外,通过隔离开发过程中的软硬件问题,RCP还能够提高开发效率,减少不必要的返工和修改;RCP平台具有高度的灵活性和可扩展性,能够满足多种项目的研发需求。用户可以根据项目的具体要求,选择合适的硬件配置和软件工具,构建符合需求的快速原型控制器。此外,随着技术的不断进步和需求的不断变化,RCP平台还能够进行升级和扩展,以适应新的应用场景和更高的要求。
传统的控制器研发过程往往涉及硬件设计、电路制作、代码编写、调试等多个环节,不仅耗时耗力,而且容易在各个环节中出现问题,导致研发周期延长。而快速原型控制器则通过集成化的硬件和软件平台,实现了算法与硬件的快速集成和测试,从而缩短了研发周期。具体来说,快速原型控制器支持用户在高级编程语言(如Matlab/Simulink)中设计控制算法,并通过自动代码生成技术将算法转换为可在控制器上运行的代码。这一过程避免了繁琐的底层编程和调试工作,使得用户能够更专注于控制算法的设计和优化。同时,快速原型控制器还提供了丰富的外设接口和调试工具,方便用户进行硬件接口的连接和调试,进一步提高了研发效率。快速原型控制器采用了先进的控制算法,能够实现对控制对象的精确控制。
高灵活快速原型控制器具备快速响应和高效执行的能力。其内部采用先进的控制算法和高速运算处理器,使得控制器能够迅速接收并处理来自传感器或其他输入设备的数据。同时,控制器通过精确的控制策略,能够实现对执行机构的快速、准确驱动,从而提高整个生产过程的效率。这种高效执行能力使得高灵活快速原型控制器在应对复杂多变的制造任务时,能够保持稳定的性能,确保生产过程的顺利进行。高灵活快速原型控制器的另一个明显优点是高度灵活性和可配置性。控制器支持多种不同的输入和输出设备,可以根据具体的应用场景和需求进行灵活配置。此外,控制器还提供了丰富的编程接口和工具,使得用户可以根据实际需要对控制器进行编程和定制,以满足个性化的控制需求。这种高度的灵活性和可配置性使得高灵活快速原型控制器能够适用于各种不同的制造场景和任务,为企业提供了更普遍的选择空间。快速原型控制器可以通过升级硬件和软件来扩展其功能,以满足更高级别的控制需求。乌鲁木齐DSPACE
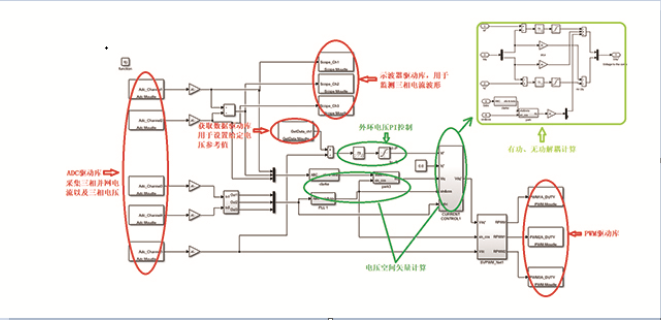
快速原型控制器在Simulink的库浏览栏中,添加研旭的驱动库。高稳定快速原型控制器企业
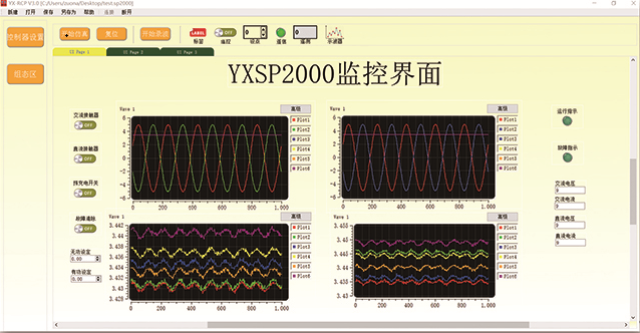
快速原型控制器支持实时监测和在线调参功能。这意味着在开发过程中,开发者可以实时观察控制器的运行状态和参数变化,从而快速发现控制算法中存在的问题。同时,通过在线调参功能,开发者可以方便地调整控制参数,优化控制效果。这种实时监测和在线调参的能力提高了开发效率和调试的便捷性。快速原型控制器具有高度的灵活性,能够适应多种应用场景的需求。无论是三维打印机、CNC加工中心还是激光快速成型机等设备,都可以通过快速原型控制器实现数字信号控制和指令解码,实现快速原型的制造。此外,快速原型控制器还可以应用于自动驾驶车辆、车辆稳定性控制、混合动力/纯电动整车控制等领域,满足各种复杂控制需求。高稳定快速原型控制器企业