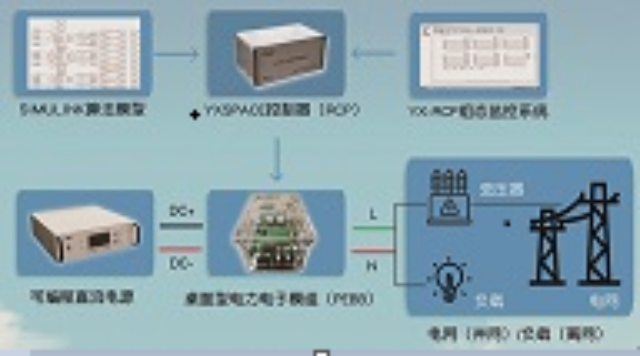
RCP的主要功能在于其能够快速地验证控制算法的有效性。通过将用图形化高级语言编写的控制算法下载到原型控制器上,科研人员可以迅速在实际环境中测试算法的性能,无需长时间等待嵌入式芯片上的算法实现。这种快速的验证过程缩短了研发周期,使得科研人员能够更快地识别并解决潜在问题,加速成果的产出;RCP使用实时硬件来运行Simulink控制算法,控制真实被控对象,如开关、电磁阀、电机、发动机等。这种集成方式使得科研人员能够在开发初期就进行实际测试,验证控制算法在实际环境中的表现。由于被控对象是真实的,因此验证结果更具可靠性和实用性。快速原型控制器的工作原理主要基于其硬件和软件系统的协同作用。石家庄硬件在环仿真系统
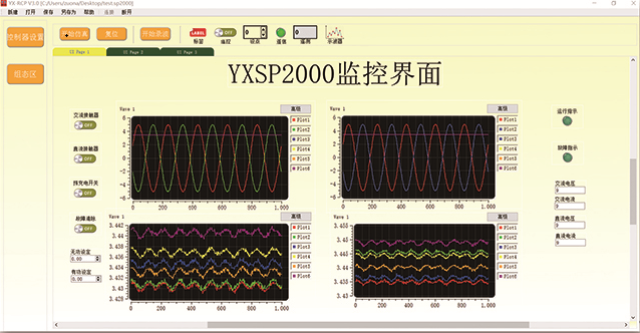
快速原型控制器在研发过程中的实时监测和在线调参功能,使得用户能够及时发现并解决控制算法中存在的问题。通过在线调参,用户可以根据实际运行情况对控制参数进行微调,以达到比较好的控制效果。这种实时反馈和优化的机制不仅提高了产品的质量,还使得产品更加适应实际应用场景。快速原型控制器还具备强大的数据处理和计算能力,能够对复杂的控制系统进行精确的控制和调节。这种精确的控制能力使得产品能够更好地满足性能要求,提高了产品的可靠性。安徽半实物仿真平台高可靠快速原型控制器具有好的扩展性,可以方便地与其他设备和系统进行集成。

高效快速原型以其高效、灵活和易用的特性,成为现代控制器设计领域的热门技术。具体而言,高效快速原型具有以下优点——缩短研发周期:高效快速原型采用先进的仿真技术和实时控制策略,能够在较短的时间内完成控制算法的设计、验证和优化。相比传统方法,它减少了研发周期,提高了工作效率。提高可靠性:高效快速原型通过仿真测试和实时控制,能够及时发现并修正控制算法中存在的问题。这种迭代式的研发过程有助于提高控制器的可靠性,降低故障率。灵活性高:高效快速原型支持多种控制算法和硬件平台,能够满足不同项目的需求。同时,它还可以根据实际需求进行定制,实现个性化的控制器设计。
高稳定快速原型控制器具备良好的稳定性。在复杂的工业环境中,控制器的稳定性直接关系到生产线的正常运行与产品质量。高稳定快速原型控制器通过先进的算法设计、优化的硬件结构以及严格的生产工艺,确保了其在长时间、强度高运行下的稳定性。这使得控制器能够在各种恶劣条件下,如高温、高湿、高振动等环境中保持稳定的性能输出,为生产线的稳定运行提供了坚实保障。高稳定快速原型控制器拥有快速响应的特性。在现代化生产过程中,对控制器的响应速度有着极高的要求。快速响应不仅能够提高生产效率,还能减少生产过程中的误差和浪费。高稳定快速原型控制器通过采用高速处理器、优化控制算法以及减少信号传输延迟等手段,实现了对控制信号的快速处理与输出。这使得控制器能够实时响应生产线的变化,及时调整控制参数,确保生产过程的精确与高效。快速原型控制器在研发过程中的实时监测和在线调参功能,使得用户能够及时发现并解决控制算法中的问题。
高灵活快速原型控制器具备快速响应和高效执行的能力。其内部采用先进的控制算法和高速运算处理器,使得控制器能够迅速接收并处理来自传感器或其他输入设备的数据。同时,控制器通过精确的控制策略,能够实现对执行机构的快速、准确驱动,从而提高整个生产过程的效率。这种高效执行能力使得高灵活快速原型控制器在应对复杂多变的制造任务时,能够保持稳定的性能,确保生产过程的顺利进行。高灵活快速原型控制器的另一个明显优点是高度灵活性和可配置性。控制器支持多种不同的输入和输出设备,可以根据具体的应用场景和需求进行灵活配置。此外,控制器还提供了丰富的编程接口和工具,使得用户可以根据实际需要对控制器进行编程和定制,以满足个性化的控制需求。这种高度的灵活性和可配置性使得高灵活快速原型控制器能够适用于各种不同的制造场景和任务,为企业提供了更普遍的选择空间。高可靠快速原型控制器以其良好的稳定性和可靠性著称。电力电子半实物仿真平台型号
快速原型控制器能够实现高效的数据处理和分析,为决策提供有力支持,提升决策效率。石家庄硬件在环仿真系统
智能化快速原型控制器采用模块化设计,支持多种编程语言和开发工具,使得用户可以根据实际需求进行灵活的编程和定制。用户可以通过简单的编程操作,实现对控制器的参数设置、功能扩展和性能优化,从而满足不同的控制需求。此外,智能化快速原型控制器还具备强大的扩展性,可以通过添加功能模块或与其他设备进行连接,实现更加复杂和高级的控制功能。这种灵活性使得控制器能够适应不同的应用场景和变化的需求,为用户的创新提供了广阔的空间。智能化快速原型控制器通过精确的控制算法和先进的传感器技术,能够实现高精度的控制。在制造过程中,控制器可以精确控制设备的运动轨迹、速度和加速度等参数,确保产品加工的准确性和一致性。这种高精度控制有助于提升产品的质量和性能,满足用户对品质高产品的需求。石家庄硬件在环仿真系统