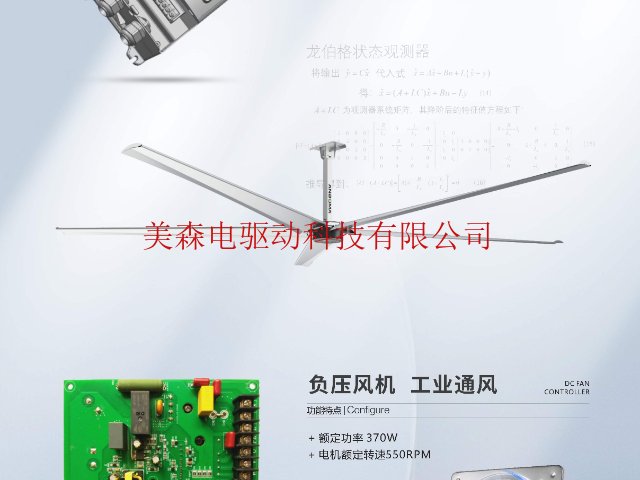
龙伯格位置观测器(Luenberger Observer)是一种用于电机控制的高级算法,其**在于通过构建电机的数学模型,并利用系统的输入输出信息,实时估计电机的转子位置和速度。这一技术特别适用于无传感器控制系统,能够在不依赖物理位置传感器的情况下,实现对电机状态的精确监测和控制。龙伯格观测器结合了系统理论和控制工程的精华,为电机控制领域带来了**性的突破。龙伯格观测器的设计基于线性系统理论,它利用状态空间方程来描述电机的动态行为。通过选择合适的观测器增益矩阵,龙伯格观测器能够构建一个与电机实际状态相近似的估计状态,这个估计状态包含了电机转子位置、速度等关键信息。在电机控制系统中,这一技术使得控制算法能够更准确地响应电机的动态变化。直流变频洗衣机:洗净比与节能的双重提升。山西汽车辅驱FOC永磁同步电机控制器

龙伯格观测器在电机控制领域具有广泛的应用前景。随着电动汽车、风力发电、数控机床、船舶电力推进、航空航天和轨道交通等领域的快速发展,对高性能电机控制策略的需求日益增长。龙伯格观测器凭借其精确的状态估计能力和强大的控制性能,将成为这些领域电机控制系统的**技术之一。未来,随着技术的不断进步和应用领域的不断拓展,龙伯格观测器将发挥更加重要的作用,为电机控制领域的发展做出更大的贡献。
在电机控制系统中集成龙伯格观测器需要进行严格的测试和验证。这包括功能测试、性能测试和稳定性测试等多个方面。通过测试可以验证观测器的性能是否满足设计要求,以及在实际运行中的稳定性和可靠性。此外,还需要对观测器进行各种工况下的测试验证,以确保其能够适应不同应用场景下的控制需求。 天津FOC永磁同步电机控制器原型机FOC控制技术的稳定性分析与优化。

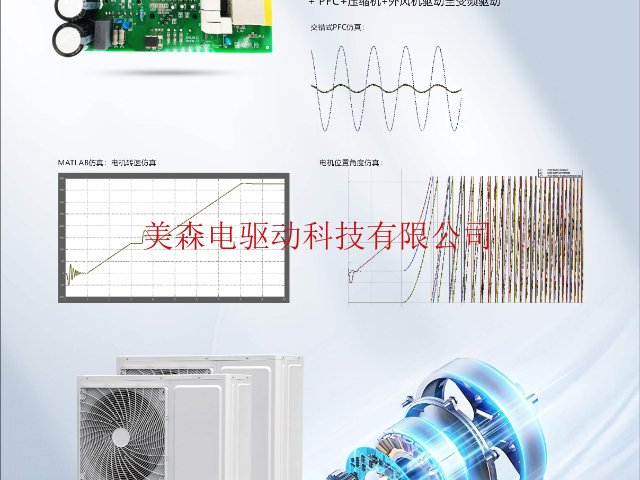
FOC变频驱动器通常由电源模块、电压逆变器、控制器、传感器、电机接口、散热器、保护和诊断电路等部分组成。电源模块提供电能供给驱动器和电机运行,电压逆变器将直流电转换成用于驱动电机的三相交流电。控制器是FOC直流无刷电机驱动器的**部分,负责执行磁场定向控制算法、闭环控制和故障保护等功能。传感器用于获取电机转子位置信息,实现磁场定向控制。FOC变频驱动器的工作流程包括采样电机三相电流、进行坐标变换、计算电流误差、通过PID控制器调节输出电压,**终通过SVPWM(Space Vector Pulse Width Modulation)算法合成电压空间矢量,驱动电机旋转。
直接转矩控制(DTC)是另一种PMSM控制策略,它直接对电机的电磁转矩进行控制,无需进行电流分解。DTC通过实时监测电机的定子电压和电流,计算电磁转矩和磁链的估计值,然后根据这些估计值调整逆变器的开关状态,以直接控制电磁转矩和磁链的变化。DTC具有响应速度快、鲁棒性强的优点,但实现起来相对复杂,对硬件的实时性和精度要求较高。无位置传感器技术是PMSM控制领域的一项重要技术。它利用电机的电压、电流等电气参数,通过算法估计电机的转子位置和速度,从而实现对电机的精确控制。无位置传感器技术不仅降低了系统的硬件成本,还提高了系统的可靠性和灵活性。然而,无位置传感器技术在实现过程中面临着诸多挑战,如参数变化、噪声干扰等,需要采用先进的算法和滤波技术来提高估计精度。龙伯格位置观测器:电机控制中的高精度定位技术。

在PMSM控制中,由于逆变器输出能力的限制,当电机电流达到饱和时,电机的控制性能将受到影响。为了解决这个问题,通常采用抗饱和控制策略。抗饱和控制通过实时监测电机的电流和电压,判断电机是否处于饱和状态,并根据判断结果调整控制器的输出,以减小电流饱和对电机控制性能的影响。PMSM的参数辨识与自适应控制是提高电机控制性能的重要手段。通过在线辨识电机的电阻、电感、永磁体磁链等参数,可以实时更新控制器的参数,以提高电机控制的准确性和鲁棒性。此外,自适应控制还可以根据电机的实际运行状态,动态调整控制策略,以应对参数变化和外部干扰。FOC控制技术在无人机电机驱动中的应用。山东FOC永磁同步电机控制器模式
FOC控制中的电流解耦与磁场定向策略。山西汽车辅驱FOC永磁同步电机控制器
现代农业中,变频器被广泛应用于灌溉系统、温室通风、农机驱动等领域。通过精确控制电机的转速和功率,变频器实现了农业生产的精细管理,提高了农产品的产量和质量。矿山机械中,变频器通过精确控制电机转速和扭矩,实现了矿石开采、运输等过程的自动化和智能化。这不仅提高了矿山生产效率,还降低了工人的劳动强度和安全风险。港口机械如起重机、装卸机等,通过引入变频器,实现了装卸过程的自动化和智能化。变频器通过精确控制电机的转速和功率,***降低了能耗,提高了港口作业的效率和安全性。游乐设施中,变频器被用于控制旋转木马、过山车等设备的速度和加速度,确保了游客的安全和舒适体验。通过精确控制电机的输出扭矩和转速,变频器实现了游乐设施的平稳运行和故障预警。山西汽车辅驱FOC永磁同步电机控制器