- 品牌
- 中科图测
- 型号
- ziki-M
- 类型
- 图像/视频位移计
- 测量精度
- ±0.02mm(距离1m);±0.1mm(距离10m);±0
- 工作温度
- -30℃至+60℃;
- 用途
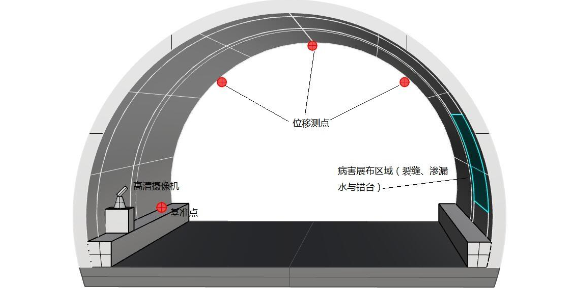
- 桥梁、隧道、大坝、护坡、山体以及建筑物等结构位移的长期监测
- 规格
- ziki-M
- 外形尺寸
- 220*120*90
- 重量
- 1
- 厂家
- 中科图测
- 产地
- 成都
- 监测距离
- 2m-500m
- 同时监测点数
- 100
- 相机分辨率
- 30万-200万
- 采集频率
- 1-800Hz
- 供电方式
- 市电交流220V /太阳能
- 靶标类型
- 有源靶标/无源靶标
- 主机功耗
- 15W
- 防护等级
- IP65
- 传输方式
- 支持有线传输、4G/5G传输
位移计是一种测量材料位移的仪器,通过测量物体的位置的变化来确定位移量。它被广泛应用于工程、材料科学、地质学等领域,用于研究材料的变形性能、结构的稳定性以及地壳运动等。位移计的工作原理基于物体的位置的变化,通常由一个固定的参考点和一个可移动的测量点组成。当物体发生位移时,测量点相对于参考点的位置也会发生变化。通过测量这种位置变化,位移计可以确定物体的位移量。根据不同的应用场景和要求,选择合适的位移计是很重要的。在实际应用中,可以根据需要选择位移计的精度、测量范围、稳定性等方面的特性。位移计可以与其他测量设备集成,以实现多参数测量和分析。非接触位移计方案

位移计是一种用于测量物体或结构的位移变化的仪器。它在工程、建筑、地震监测等领域中被普遍使用。以下是使用位移计时需要注意的事项:安装位置:位移计的准确性和可靠性受到安装位置的影响。应选择合适的位置安装位移计,以确保能够准确测量所需的位移变化。安装位置应尽量避免受到外部干扰和振动。校准和校验:位移计在使用前需要进行校准和校验,以确保其测量结果的准确性。校准应按照制造商的指导进行,并定期进行校验以检查仪器的性能是否正常。非接触位移计质量位移计的测量结果如何与其他物理量相关联?

仪器安装位置选择:位移计的安装位置选择对测量结果有重要影响。如果安装位置选择不当,可能会导致测量误差增大。解决方法是根据具体测量需求选择合适的安装位置,并遵循仪器说明书中的建议。仪器与被测对象之间的连接问题:位移计需要与被测对象进行连接,以实现位移测量。连接方式不正确或连接不牢固可能导致测量误差。解决方法是确保连接方式正确,并使用适当的连接件进行连接。仪器读数误差校正:位移计的读数可能存在一定的误差,需要进行误差校正。解决方法是根据仪器说明书中的校正方法进行校正,或者使用校准设备进行校正。
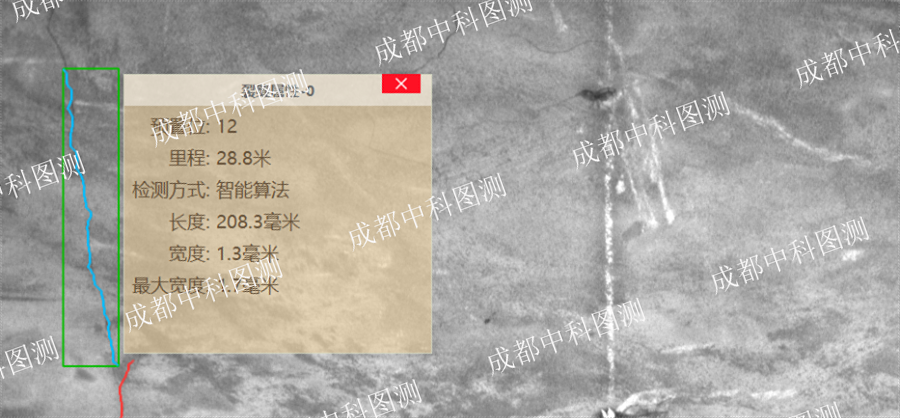
姿态估计:在传感器测量的基础上,相机位移计使用姿态估计算法来推导相机的位移和姿态信息。姿态估计算法通常基于传感器测量数据,通过数学模型和滤波技术来估计相机的姿态。常见的姿态估计算法包括卡尔曼滤波、扩展卡尔曼滤波、粒子滤波和非线性优化等。这些算法可以根据传感器测量数据的特点和应用需求,选择合适的方法来估计相机的位移和姿态。姿态估计算法通常需要考虑传感器的误差、噪声和不确定性等因素,并通过滤波和校准等技术来提高估计的准确性和稳定性。宽度测量位移计在工业生产中广泛应用,可以用于监测产品的尺寸变化。

地震监测:位移计在地震监测中起着重要的作用。地震是一种常见的自然灾害,对建筑结构的破坏性非常大。通过安装位移计,可以实时监测地震引起的结构位移,及时判断结构的安全性,并采取相应的防护措施,减少地震对建筑结构的破坏。施工监测:位移计在建筑施工过程中也起着重要的监测作用。在施工过程中,结构的变形和位移情况可能会发生变化,通过位移计可以实时监测结构的变形和位移情况,及时发现和解决施工中的问题,确保施工质量和安全。结构健康监测:位移计可以用于长期的结构健康监测。通过对结构位移的长期监测,可以了解结构的变形和位移趋势,判断结构的健康状况,及时发现结构的隐患和问题,并采取相应的维护和修复措施,延长结构的使用寿命。宽度测量位移计可以精确测量物体的宽度变化,从而提供准确的数据。视觉位移计公司
位移计的测量结果可以用于分析物体的运动、变形或振动。非接触位移计方案
相机位移计是一种用于测量相机在空间中的位移和姿态变化的设备。它通常由多个传感器和计算单元组成,能够实时地监测相机的位置和方向,并将这些数据用于各种应用,如虚拟现实、增强现实、机器人导航等。相机位移计的工作原理通常基于传感器技术,包括惯性测量单元(IMU)、全局定位系统(GPS)、视觉传感器等。这些传感器能够感知相机的加速度、角速度、方向等信息,并将其转化为数字信号,供计算单元进行处理。在相机位移计中,IMU是蕞常用的传感器之一。它由加速度计和陀螺仪组成,能够测量相机的线性加速度和角速度。通过积分这些测量值,可以得到相机的速度和位移。然而,由于积分的误差会随着时间的推移而累积,所以IMU通常需要与其他传感器结合使用,以提高测量的准确性和稳定性。非接触位移计方案

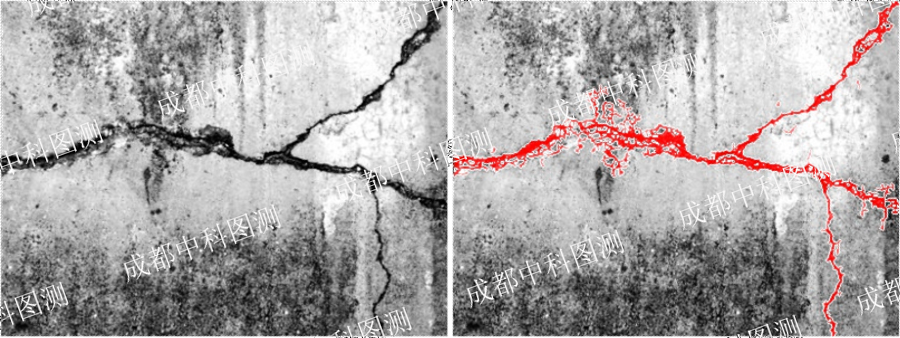
三维重建:通过对特征点的位移量进行三角测量,位移计可以重建物体表面的三维形状。这样,它能够提供更详细的位移和形变信息,而不仅限于单点测量。背景校正:为了消除环境光照和背景的干扰,位移计会进行背景校正处理。这可以通过获取物体表面在无力或无变形条件下的基准图像,并将其与测量图像进行比较来实现。高速图像采集:为了捕捉快速运动物体的位移,图像位移计的图像采集设备需要具备高速拍摄能力。这通常包括高帧率的相机和快速传感器。位移计的维护和保养方法是什么?工程位移计采购位移计的发展历程:早期的位移计是机械式位移计,它是由一根细长的金属丝或弹簧组成的。当物体发生位移时,金属丝或弹簧也会发生形变,通过测量形变的大...
- 视频位移计厂价 2025-11-25
- 宽度测量位移计技术原理 2025-11-25
- 位移计价格 2025-11-25
- 视觉位移计结构 2025-11-25
- 四川工程试验位移计生产 2025-11-25
- 铁路边坡位移计厂家 2025-11-25
- 四川工程位移计厂家现货 2025-11-25
- 四川视频位移计厂家供应 2025-11-25
- 非接触位移计稳定性 2025-11-25
- 成都隧道巡检机器人供应厂家 2025-11-25



- 成都宽度测量位移计厂家有哪些 2025-11-25
- 宽度测量位移计 2025-11-25
- 图像位移测试系统厂价 2025-11-25
- 非接触位移计厂家 2025-11-24
- 进口位移计稳定性 2025-11-24
- 阵列式位移计直销 2025-11-24



- 公路隧道无人智能巡检机器人批发 11-25
- 宽度测量位移计技术原理 11-25
- 位移计价格 11-25
- 视觉位移计结构 11-25
- 公路隧道智能巡检机器人中标 11-25
- 公路交通隧道自动化巡检设备AI视觉检测 11-25
- 四川工程试验位移计生产 11-25
- 成都轨道式巡检机器人定制 11-25
- 公路巡检机器人定制 11-25
- 铁路边坡位移计厂家 11-25