- 品牌
- 迅传智能
- 型号
- 齐全
- 包装型式
- 包装盒,包装袋,箱子,瓶,罐,杯,软管
在磁驱输送线的运行过程中,涉及到电能与磁能、机械能之间的转换。当电流通过电磁线圈时,电能转化为磁能,产生磁场。磁场与输送载体相互作用,将磁能转化为输送载体的机械能,使其实现悬浮和运动。同时,在输送载体运动的过程中,通过电磁感应原理,部分机械能又可以转化为电能回馈到电网中,实现能量的回收利用。这种高效的能量转换和利用方式,不仅提高了能源利用率,降低了能耗,还减少了对环境的影响,符合可持续发展的要求。平稳运行,运输途中超安稳。湛江磁悬浮磁驱输送线安装
磁驱输送线搭载了先进且高度智能化的控制系统,能够对其运行状态展开整体的实时监测与精细诊断。该系统运用了传感器技术、数据分析算法等,对设备的运行参数,如速度、温度、电流等进行实时采集和分析。一旦检测到参数偏离正常范围,便会迅速捕捉到设备的潜在问题,并提前发出预警,以声光、短信或邮件等多种形式,及时提醒维护人员进行维护和保养。这使得维护工作不再盲目,而是更具针对性和预防性,能够有效避免设备故障的发生,进一步提高设备的稳定性和可靠性。通过智能化的监测和诊断系统,企业借助网络通信技术,实现对磁驱输送线的远程监控和管理。即便维护人员身处异地,也能通过电脑或手机终端,及时了解设备的运行情况,快速做出相应的决策。这种智能化的维护方式,极大地提高了维护工作的效率,降低了企业因设备故障带来的运营风险。阳江食品磁驱输送线维护模块化装,安装便捷又高效。
磁驱输送线利用多种传感器对输送载体的关键参数进行实时捕捉。位置传感器采用激光、电磁感应等技术,精确测定输送载体在轨道上的坐标位置,精度可达微米甚至纳米级,为后续的精确控制提供基础数据。速度传感器运用多普勒效应、脉冲计数等原理,实时反馈输送载体的运行速度,以便及时调整驱动功率。悬浮高度传感器借助电容式、电感式等感应方式,时刻监测输送载体与轨道之间的距离,保障悬浮的稳定性。接收传感器传来的数据,依据预设的参数和复杂算法对电磁线圈的电流、电压等进行实时调整。当检测到输送载体的悬浮高度发生变化时,控制系统会迅速计算出需要调整的电磁铁电流大小,通过功率放大器等设备精细改变电流,使其恢复到设定高度。在速度调节方面,若需要加快输送速度,控制系统会增加电磁线圈的通电频率和电流强度,增强驱动电磁力;反之则降低相关参数。对于位置控制,当输送载体偏离预设路径时,控制系统会调整不同位置电磁线圈的工作状态,产生纠正电磁力,引导其回归正确轨道。此外,还可通过编程设置不同的工作模式,如快速输送模式、精细定位模式等,满足多样化生产需求。
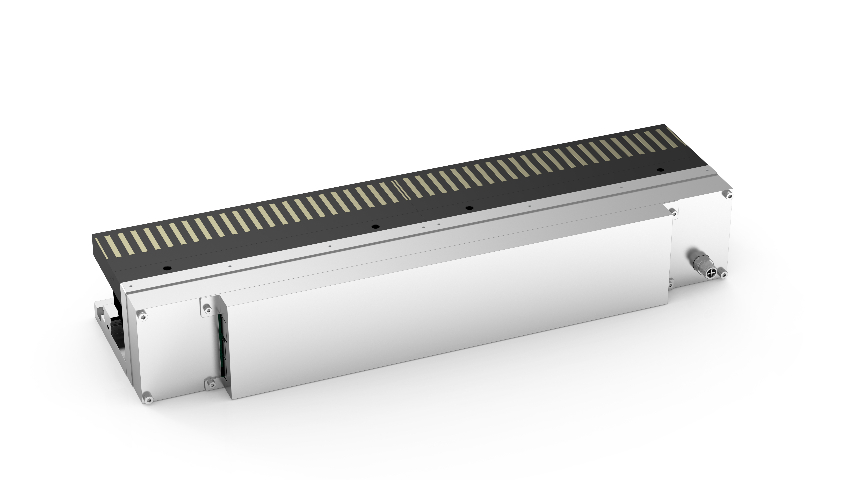
磁驱输送线的工作原理基于电磁感应定律,利用电磁力实现输送载体的悬浮与驱动。当电流通过轨道上的电磁线圈,会产生强大磁场,依据电磁感应,变化磁场在附近导体产生感应电流,进而生成与原磁场相互作用的磁场力,这是关键。输送载体的悬浮方式常见两种。常导磁吸式利用同名磁极排斥,通过控制电磁铁电流,使输送载体悬浮于轨道上方几毫米到几厘米处;超导磁斥式借助超导材料在低温下零电阻和完全抗磁性,超导线圈通电产生强磁场,与轨道永磁体作用,悬浮高度可达几十厘米。在驱动方面,轨道上沿输送方向的电磁线圈按特定顺序和时间间隔通电,产生移动磁场,在输送载体上感应出电流,二者相互作用产生电磁力,推动载体前行,通过精确控制通电顺序和电流,就能精细调控其速度与方向。快速输送,抢占市场好先机。
低耗高效特性——节能与维护成本的双重优化磁驱输送线在能耗与维护成本上的优势,使其成为降本增效的理想选择。由于采用非接触驱动,系统无需克服机械摩擦,能耗为传统链条输送线的60%——以100米长的生产线为例,磁驱系统年耗电量约8000度,而同等规模的皮带输送线需13000度以上。同时,动子与轨道无机械磨损,关键部件(线圈、永磁体)寿命可达10年以上,避免了传统输送线因皮带老化、链条锈蚀导致的频繁更换(年均维护成本降低70%)。在维护便利性上,系统具备智能诊断功能:通过温度传感器、振动监测模块实时采集设备数据,当线圈电流异常或永磁体磁力衰减时,可提前预警并定位故障点。例如某锂电工厂应用中,系统通过分析动子加速度曲线,提前预判出某段轨道线圈的老化趋势,避免了突发停机导致的20万元产能损失。这种“低能耗+可预测维护”的特性,使磁驱输送线的全生命周期成本降低40%,明显提升企业的盈利能力。非接触传动,节能稳定又耐用。大兴区工业磁驱输送线
高效节能,绿色高效两不误。湛江磁悬浮磁驱输送线安装
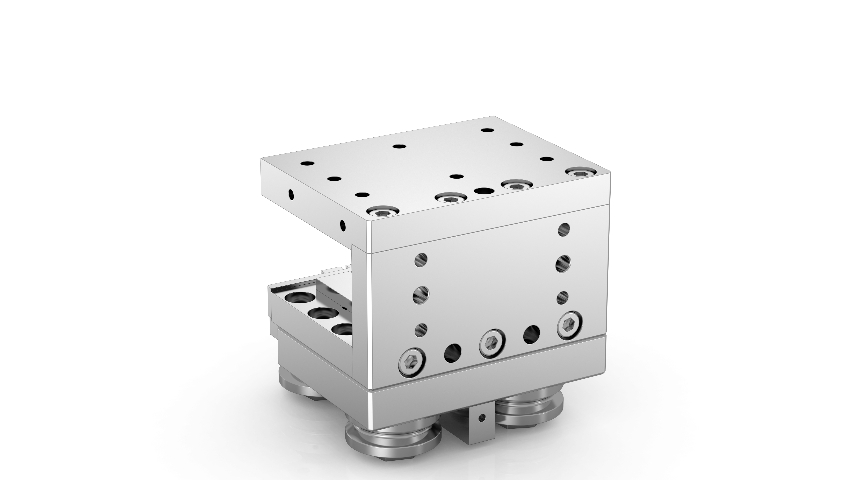
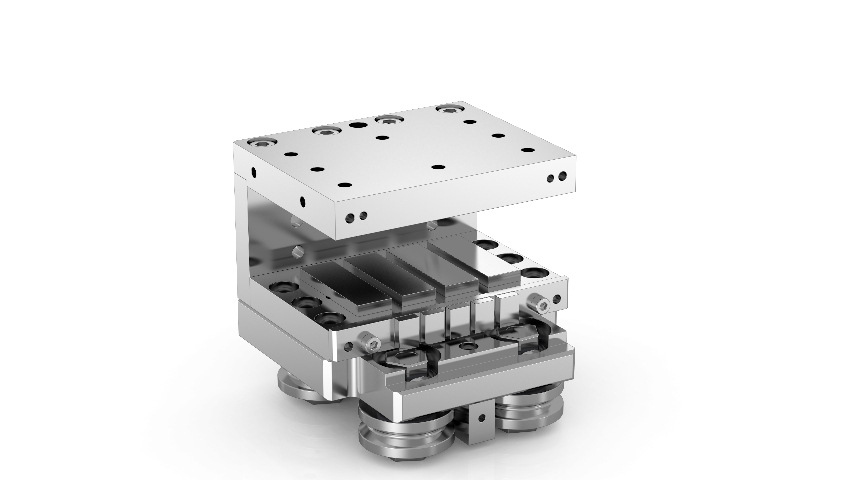
磁驱输送线的关键原理基于电磁感应与磁场力的准确控制,颠覆了传统机械传动的固有模式。系统主要由定子轨道与动子小车两部分构成:定子轨道内置阵列式线圈,通过交变电流产生移动磁场;动子小车搭载永磁体,在磁场力的作用下实现无接触悬浮与驱动。这种“定线圈+动磁铁”的设计,使动子摆脱了线缆与机械连接件的束缚,从根源上消除了摩擦损耗与机械磨损。与传统直线电机相比,磁驱系统通过分布式控制系统实现对每个动子的单独驱动,可实时调整磁场强度与方向,使动子的速度、加速度及定位精度达到微米级控制(重复定位精度±5μm)。例如在驱动过程中,系统通过霍尔传感器实时监测动子位置,结合PID算法动态修正电流参数,确保动子在高速运动时仍能保持稳定。这种非接触式的驱动原理,不仅简化了机械结构,更赋予了输送系统前所未有的灵活性与可控性,为工业自动化提供了全新的技术范式。湛江磁悬浮磁驱输送线安装
- 萍乡工业磁驱输送线调试 2026-04-11
- 雅安磁驱磁驱输送线价格 2026-04-11
- 怀柔区磁悬浮磁驱输送线定制 2026-04-11
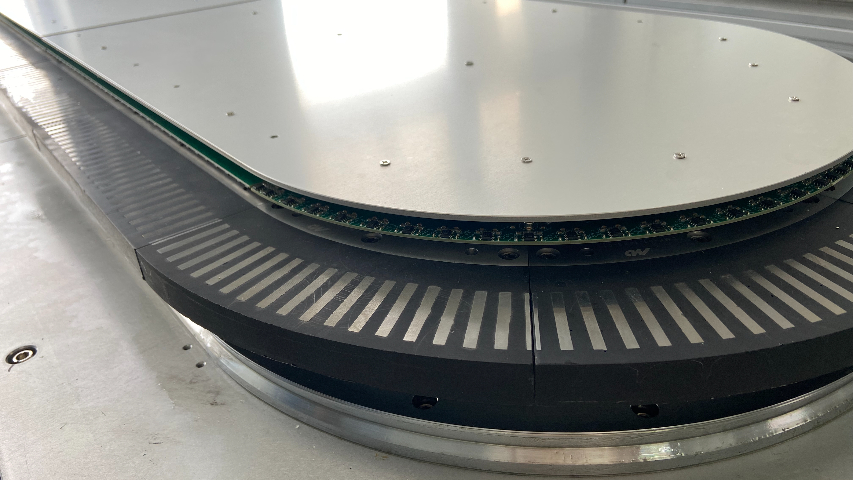
- 黔江区环形磁驱输送线定制 2026-04-10
- 烟台磁驱磁驱输送线厂家 2026-04-10
- 城口磁悬浮磁驱输送线维护 2026-04-10
- 南平接驳磁驱输送线调试 2026-04-10
- 朝阳区磁驱输送线厂家 2026-04-10
- 青岛智能磁驱输送线调试 2026-04-10
- 乐山接驳磁驱输送线 2026-04-10
- 绵阳食品磁驱输送线价格 2026-04-10
- 珠海磁驱输送线调试 2026-04-10