控制系统是弧焊工作站的 “大脑”,负责协调各单元协同工作。其中心为工业级 PLC,可接收来自传感器的实时信号,根据预设程序控制焊接参数、机械运动节奏与送丝速度。配套的编程模块提供图形化操作界面,操作人员可通过拖拽图标规划焊接路径,设置各段焊缝的工艺参数(如电流、电压、焊接速度),无需复杂代码编写。部分高层系统还具备离线编程功能,可在计算机上模拟焊接过程,优化路径后再导入工作站,减少现场调试时间,提升工作效率。保护气体防止熔池受空气污染。杭州移动式焊接工作站厂家直销
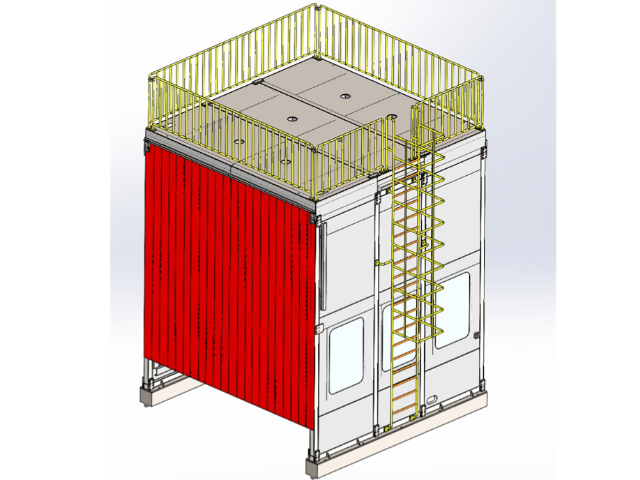
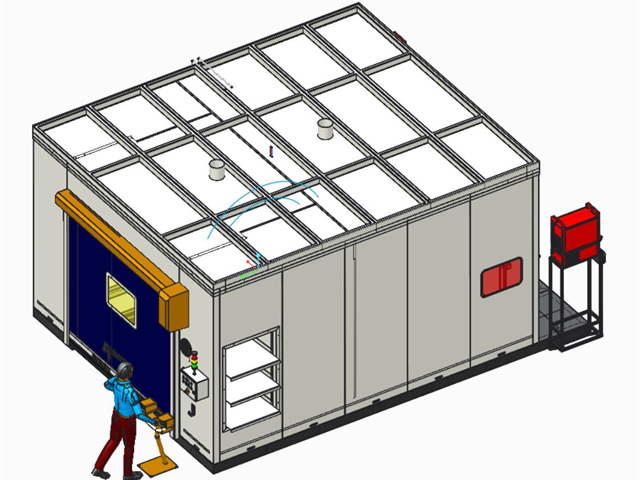
安全保障体系为焊接机器人工作站的稳定运行保驾护航。防护栏与安全门将焊接区域与外界有效隔离,防止人员意外进入危险区域。光幕与传感器时刻监测工作站的运行状态,一旦检测到异常情况,如人员靠近危险区域、设备运行故障等,能迅速触发安全机制,及时停止机器人运行,避免事故发生。此外,工作站在设计与制造过程中,充分考虑电气安全、机械安全等多方面因素,从源头降低安全风险,为操作人员与设备安全构筑起一道坚实可靠的防线 。
南京移动式焊接工作站厂家供应激光切割工作站都能轻松应对,展现其强大的材料加工能力。
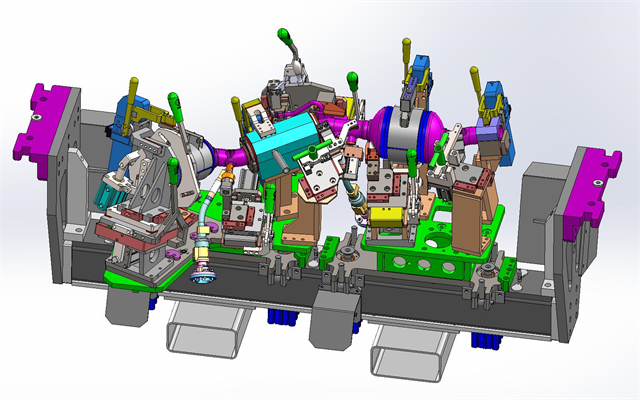
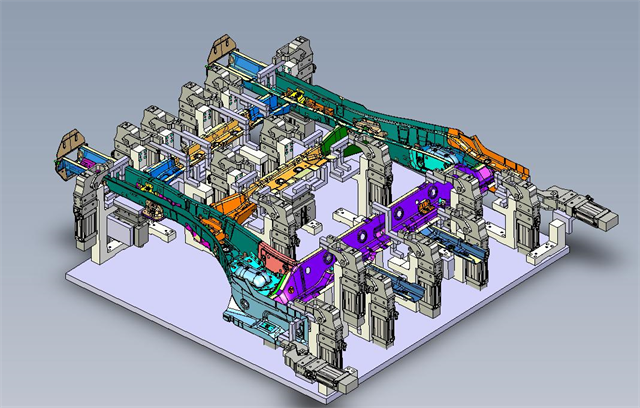
机械执行机构主要由多轴机械臂或焊接操作机组成,通过精密伺服电机驱动,实现焊枪的空间位移与姿态调整。机械臂的关节处采用高精度轴承,配合减速机构,可实现低速平稳运行与快速定位切换。操作机则通过导轨滑块结构带动工件移动,与机械臂形成协同作业,适应不同尺寸工件的焊接需求。执行机构的运动精度控制在合理范围,能保证焊缝位置的一致性,减少因机械误差导致的焊接缺陷。机构表面经过防腐蚀处理,可适应车间内的潮湿、多尘环境,延长设备使用寿命。
传感与检测装置为弧焊机器人提供环境感知能力,助力实现自动化与智能化焊接。常见的传感器包括电弧传感器、视觉传感器与触觉传感器:电弧传感器通过监测焊接电流与电压变化,实时判断焊枪与工件的相对位置,实现焊缝跟踪;视觉传感器借助高清相机拍摄焊缝图像,经图像处理算法识别焊缝位置与形状,为路径修正提供依据;触觉传感器则能感知焊接压力等物理量,确保工件装配与焊接过程的贴合度。这些传感装置与控制系统协同工作,可有效应对工件尺寸误差、装配偏差等问题,提高焊接质量的一致性。弧焊工作站的主要优势在于其高度自动化与智能化。

弧焊机器人的机械执行单元是实现准确焊接动作的基础,主要由多关节机械臂与末端执行器构成。机械臂通常采用 6 轴或更多自由度设计,每个关节配备高精度伺服电机与减速机构,可实现 360 度灵活旋转与毫米级位移控制,确保焊枪能抵达复杂工件的任意焊接位置。末端执行器即焊枪组件,集成了导电嘴、保护气体喷嘴等部件,能稳定输送焊接电流与保护气体,配合机械臂的运动轨迹完成连续焊接作业。这类机械结构采用高超度合金材料制造,兼具轻量化与高刚性特点,可在长时间高频次作业中保持稳定的运动精度,满足汽车制造、工程机械等行业的批量生产需求。变位机调整工件至适宜焊接位置。合肥弧焊工作站制造商
弧焊工作站能够实时监测焊接过程中的各项参数,如电流、电压、焊接速度等。杭州移动式焊接工作站厂家直销
机器人自动上下料方案的智能集成能力,使其能与企业现有管理系统形成深度协同。通过工业互联网接口,方案可实时将生产数据上传至 MES 系统,包括工件数量、运行时长等关键信息,帮助管理人员实现可视化管控。同时,系统支持与 ERP 系统联动,根据生产计划自动调整上下料节奏,确保物料供应与生产进度准确匹配。这种一体化管理模式,不仅减少了人工统计的误差,还能通过数据分析优化生产流程,为企业决策提供数据支持。
在空间利用方面,机器人自动上下料方案展现出显赫的灵活性。相较于传统生产线固定的布局,机器人可采用壁挂式、倒挂式等安装方式,充分利用车间垂直空间,减少地面占用面积。对于空间紧张的中小型车间,方案可通过紧凑的机械结构设计,在有限区域内完成多台设备的上下料作业。例如,某精密仪器厂引入该方案后,生产线占地面积减少 25%,腾出的空间可用于新增设备或改善作业环境,间接提升了车间的整体运营效率。 杭州移动式焊接工作站厂家直销