- 品牌
- 汇像
- 型号
- HelenX-5-P
- 加工定制
- 是
- 厂家
- 汇像
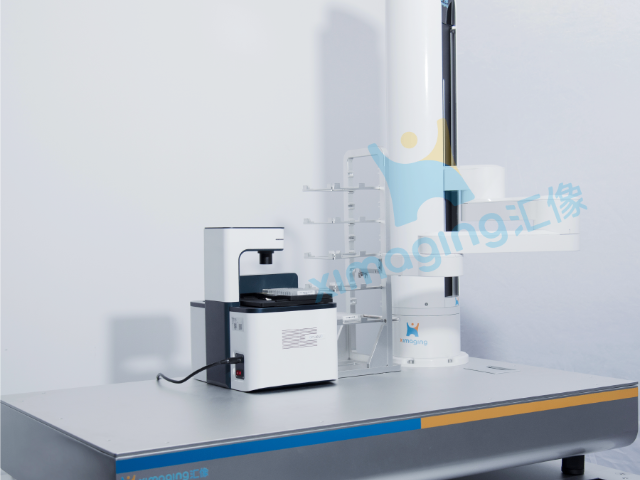
汇像HelenX-4L是一款高性价比的桌面4轴协作机械手,可选配多种应用工具模块,特别适用于在紧凑空间中,完成人机协作场景下的高效执行任务。汇像HelenX-4L系统搭载了高性能嵌入式机械手控制器。该控制器提供高效的图形化编程模式和直观的拖拽示教功能,可快速生成精确可靠的运动轨迹。内置安全防护功能,能够实现多级碰撞检测和安全监测。高通用性,适用汇像所有型号机械臂浏览器网页,支持多客户端平台可视化点位,助力“看得见摸得着”的现场实施。跨学科实验室的 “多变助手”:汇像机械手以可编程性适配多元实验需求。北京智能机械手
机械手
在现代科研实验室,尤其是生物、化学、医学等领域,样本处理工作繁琐且对精度要求极高。机械手的出现,极大地改变了这一现状。以生物样本检测为例,机械手凭借其多关节的灵活构造,能够精细地抓取样本容器,准确吸取定量的样本。在进行样本稀释操作时,可依据预设程序,精确控制加入稀释液的量,误差可控制在极小范围内,这是人工操作难以企及的精度。对于离心操作,汇像机械手能将样本准确放置在离心机的指定位置,并在离心结束后及时取出,整个过程实现自动化,降低了人为因素导致的样本污染风险,同时也提高了实验的可重复性。贵阳五轴机械手“智灵者” HelenX-5S,专攻空间限制难题,强劲性能让实验高效推进。

在科研实验中,任何一个环节的失误都可能导致整个实验的失败,造成时间和资源的浪费。汇像HelenX-4H机械手以其出色的稳定性和可靠性,为实验的顺利进行提供了坚实保障。它采用了品质的零部件和先进的制造工艺,确保机械手在长时间、急速的工作环境下依然能够稳定运行。同时,机械手还配备了多重安全保护机制,如碰撞检测、过载保护等。一旦在操作过程中检测到异常情况,机械手会立即停止动作,避免对实验设备和样本造成损坏,很大程度地保障了实验的安全性和可靠性,让科研人员能够安心开展实验工作。
对于一些复杂的实验流程,比如多步骤的样品转移、不同设备间的协同作业,汇像HelenX-5S机械手也能轻松应对。其内置的智能程序已经预设了多种常见的实验操作流程,科研人员只需在操作界面上轻轻一点,选择对应的流程模式,机械手就会按照比较好路径自动完成一系列连贯动作。想象一下,以往需要手动重复几十次的样品分装,现在只需按下“自动分装”按钮,机械手就会有条不紊地拿起移液枪,精细吸取样品,再逐个注入到对应的容器中,整个过程无需人工干预。这种一键式操作,不仅减少了人为操作的误差,更让科研人员从重复劳动中解放出来,有更多时间专注于实验设计和数据分析。“智灵者” HelenX-4H,适应多样实验场景,灵活协作让工作事半功倍。

一个高效的实验室,离不开各种设备之间的协同工作。汇像HelenX-3L机械手就像一位指挥官,能够与实验室中的其他设备实现无缝互联,构建起一个高效的实验生态系统。它可以与自动化的样本存储设备配合,自动从存储架上取出所需样本,并准确地放置到实验仪器中进行检测。检测完成后,又能将样本送回原位或转移至下一个实验环节。同时,HelenX-3机械手还能与数据分析软件进行数据交互,实时将实验数据传输至软件中进行分析和处理。这种设备之间的高效协作,不仅避免了人工操作过程中可能出现的样本混淆和数据记录错误,还提高了整个实验流程的连贯性和效率,让实验室的工作变得更加流畅、有序。临床检验实验室的 “速度担当”:汇像机械手凭高通量处理缩短检测周期。兰州自动机械手厂家
“智灵者” HelenX-4P,智能优化实验流程,让每一步操作都精确高效。北京智能机械手
国家对于科技创新的支持力度持续加大,在《“十四五”国家科技创新规划》中,明确提出要加强科研基础设施和科研仪器设备的建设与升级,推动科研手段的现代化。实验室作为科技创新的重要载体,其自动化、智能化水平的提升成为重点发展方向,这为实验室机械手的研发与应用提供了坚实的政策保障。同时,《“机器人+”应用行动实施方案》中提到,要拓展机器人在科研实验等领域的应用,鼓励开发适应不同实验场景的机器人装备。实验室机械手作为科研实验领域机器人的重要组成部分,迎来了前所未有的发展契机,政策的红利不断释放,推动着实验室机械手技术的快速进步和广泛应用。北京智能机械手
近日,一科研机构采用了一批新型实验室机械手,在操作精度、灵活度及智能化水平三大维度实现突破性进展。该设备搭载自主研发的高精度传感模组与自适应控制算法,定位精度达到0.1微米级,较传统设备提升3个数量级,性能指标超出国际同类产品。在多场景验证实验中,该机械手展现出良好的任务适配能力:在化学微量分析实验中,完成50纳升试剂移液操作时误差率控制在0.3%以内;在细胞生物学研究中,可实现直径5微米单细胞的无损抓取与跨培养皿转移,细胞存活率保持98%以上。研发团队首席工程师表示,这款设备的成功研发响应了《“十四五”国家科技创新规划》中关于科研仪器智能化升级的战略要求,预计将使材料科学、生命科学等领域的实...
- 大同移动式机械手品牌 2026-03-19
- 太原工业机械手品牌 2026-03-19
- 沈阳国产机械手设备制造厂家 2026-03-19
- 杭州自动机械手供应商 2026-03-19
- 常州固定式机械手价格 2026-03-19
- 杭州工业机械手供应商 2026-03-19
- 国产机械手 2026-03-19
- 郑州自动机械手品牌 2026-03-19
- 珠海工业机械手多少钱 2026-03-19
- 湖州三轴机械手供应商 2026-01-01

- 烟台机械手厂家 2025-12-31
- 苏州智能机械手品牌 2025-12-31
- 宁波机械手设备制造厂家 2025-12-31
- 北京七轴机械手设备制造厂家 2025-12-31
- 成都国产机械手厂商 2025-12-31
- 重庆机械手多少钱 2025-12-31





- 十堰医疗移动机器人厂商 03-20
- 嘉兴体积测量仪设备制造厂家 03-20
- 南宁手持式体积测量仪设备制造厂家 03-20
- 贵阳实验室移动机器人厂商 03-20
- 昆明过度包装体积测量仪系统 03-20
- 常州过度包装体积测量仪供应商 03-20
- 湖州自动体积测量仪供应商 03-20
- 苏州医疗移动机器人厂商 03-19
- 贵阳自主移动机器人底盘 03-19
- 武汉三轴协作机器人负载 03-19