- 品牌
- 苏州森合知库
- 型号
- SHS1000
- 是否定制
- 是
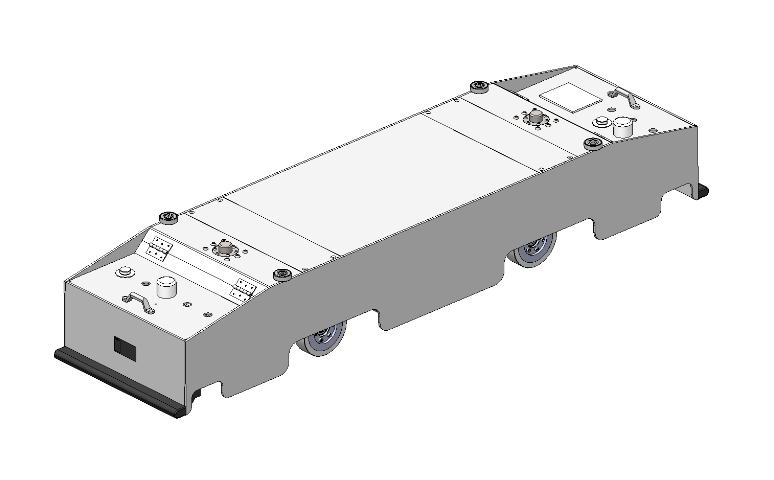
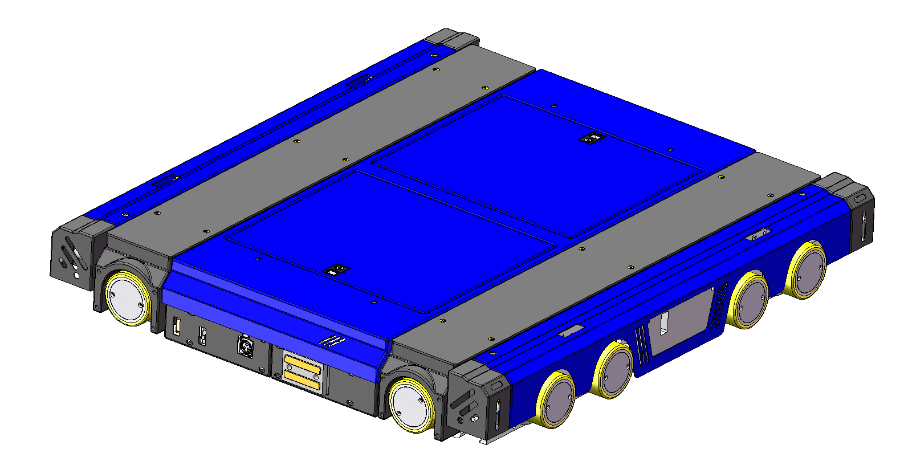
定制化四向车对特殊地面环境的适配能力体现在轮组的定制化设计上,针对不同地面类型优化轮组材质与结构。对于防静电地面(如电子工厂的 PVC 防静电地面),设备采用导电橡胶轮(表面电阻 10^6-10^8Ω),可将设备运行产生的静电通过轮组导入地面,避免静电损坏电子元件;对于凹凸地面(如物流仓库的水泥破损地面,凹凸差≤10mm),设备采用弹性轮组(轮芯为钢质,外层为聚氨酯弹性体,硬度 55 Shore A),弹性材质可吸收地面凹凸产生的振动,确保设备平稳运行。某电子工厂的防静电仓库中,传统四向车采用普通橡胶轮,运行时静电电压达 1000V,需额外铺设防静电地板革(成本 50 元 /㎡);引入该定制化设备后,导电橡胶轮可将静电电压控制在 100V 以下,无需额外铺设地板革,节省成本 30 万元。某物流仓库的地面因使用年限长,存在多处凹凸(比较大凹凸差 8mm),传统设备运行时晃动幅度达 15mm,货物易倾倒;引入弹性轮组的定制化设备后,晃动幅度降至 3mm,货物倾倒率从 1% 降至 0。此外,轮组还可根据地面摩擦系数调整 —— 对于光滑地面(如环氧地坪),轮组采用高摩擦系数材质(摩擦系数 0.8),避免打滑。立库四向车可与立库货架的检测传感器联动,实时反馈货位占用状态,避免货位重叠。安徽智能四向车
四向车调度系统的主要价值,在于通过智能算法提升多设备协同效率,避免资源浪费。多车协同功能基于 “任务池 + 分配算法” 实现:WCS 系统将所有作业任务(入库、出库、盘点)汇总至任务池,调度系统根据各四向车的实时位置(如距离货位较近的车优先分配任务)、负载状态(空载车优先分配入库任务)、故障情况(正常运行的车优先分配紧急任务),自动分配任务,避免部分设备闲置、部分设备过载的情况 —— 例如电商大促期间,10 台四向车可通过协同作业,将出库效率提升至单台作业的 8-9 倍(考虑避障与路径重叠时间)。动态避障功能则通过 “实时位置共享 + 路径预判” 实现:每台四向车每秒向调度系统上传 3 次位置信息,系统根据所有车辆的位置与行驶方向,预判是否存在路径交叉;若发现两台车将在 10s 内到达同一交叉点,系统会指令后出发的车辆暂停,或调整其中一台车的行驶路径(如绕行相邻巷道),避免碰撞。订单优先级优化功能,可根据业务需求设置权重(如医药急救药品订单优先级为比较高,普通日用品订单为常规),调度系统在分配任务时,优先执行高优先级订单 苏州立库四向车解决方案立库四向车具备货位记忆功能,可通过存储的货位坐标快速定位,减少空驶路径,提升作业效率。
四向车的设备状态监控模块,是实现 “预测性维护”、降低停机风险的主要。该模块通过传感器实时采集设备运行数据,涵盖三类关键信息:运行参数(行驶速度、顶升时间、换向次数),用于判断设备是否处于正常作业状态(如速度突然下降可能是驱动电机故障前兆);能源参数(电池电量、充电次数、能耗),用于管理设备续航(如电量低于 20% 时,自动提醒充电,避免中途断电);故障数据(电机过载、传感器异常、通讯中断),用于快速定位问题(如传感器异常时,会记录异常发生时间、传感器 ID,便于运维人员针对性检查)。这些数据通过通讯模块实时上传至管理系统,系统会以可视化仪表盘形式展示(如速度曲线、电量柱状图、故障预警列表),管理人员可直观掌握所有设备的运行状态。远程诊断功能则基于故障数据实现:当设备出现故障时,系统会自动分析故障代码,并匹配故障知识库中的解决方案,运维人员可通过远程终端查看解决方案,甚至通过云通讯下发参数调整指令(如重置电机保护阈值),无需现场排查。这种监控与诊断模式,使设备故障排查时间从平均 4 小时缩短至 1 小时,年停机时间减少 60%,在冷链、医药等连续作业要求高的场景中,有效降低因设备故障导致的仓储中断损失。
四向车穿梭车的多车协同能力依赖于集中调度系统的 “动态路径规划算法”。系统通过实时采集多台设备的位置、电量、作业状态等数据,基于 “短路径 + 负载均衡” 原则分配任务 —— 当某一通道出现多车交汇时,系统会自动生成避让路线,优先保障高优先级订单(如紧急出库订单)的作业效率。在某快消品仓储中心,10 台四向车穿梭车协同运行时,集中系统可实时监控每台设备的运行轨迹,通过动态调整作业顺序,使通道拥堵率从传统调度模式的 15% 降至 3% 以下。同时,系统支持 “断点续作” 功能,若某台设备突发故障,未完成任务会自动分配给空闲设备,确保仓储吞吐量稳定 —— 该中心引入协同调度后,单日货物吞吐量从 5000 托盘提升至 7200 托盘,且作业延误率控制在 0.5% 以内。定制化四向车可增加扫码识别模块,实现货物二维码 / 条形码的自动读取,提升货物追溯精度。

四向车的双重定位算法,是解决 “累计误差” 问题、确保高精度作业的关键。脉冲定位算法基于编码器实现:编码器安装在驱动轮上,车轮每转动一圈,编码器会产生固定数量的脉冲信号(如每圈 1000 个脉冲),软件通过计数脉冲数量计算设备位移(如车轮周长 0.5m,1000 个脉冲对应位移 0.5m)。但脉冲定位存在累计误差问题 —— 长期运行中,车轮磨损、轨道打滑等因素会导致实际位移与脉冲计算位移偏差逐渐增大(如运行 1000m 后,误差可能达到 5-10mm),影响换向与存取精度。RFID 定位算法则作为修正机制,轨道每隔 1m 设置一个ID 的定位码,四向车行驶过程中,RFID 传感器每扫描到一个定位码,就会将该定位码的实际坐标与脉冲计算的位移坐标进行对比,若存在偏差(如脉冲计算位移为 100m,定位码实际坐标为 100.003m),软件会自动修正脉冲计数参数,消除累计误差。这种 “脉冲实时计算 + RFID 定期修正” 的双重定位模式,使四向车的定位精度稳定在 ±1mm 以内,较单一脉冲定位算法,精度提升 80%。在换向场景中,该算法尤为重要 —— 例如 Y 向换向时,若存在 5mm 定位误差,可能导致车轮无法精细对接 Y 向轨道,引发设备卡顿,而双重定位算法可通过定位码修正,确保换向时车轮与轨道完全对齐。定制化四向车可集成称重功能(精度 ±10g),实时反馈货物重量,满足食品、医药等称重需求场景。锂电四向车自动叉车
四向车提升机可实现四向车在立体仓库不同楼层间的垂直转运,提升高度可达 40m,适配高货架立库。安徽智能四向车
四向车穿梭车的主要优势在于突破传统穿梭车 “单向运行 + 掉头转向” 的局限,通过双向驱动轮组与 90° 转向机构设计,实现纵横向直接切换。其运行逻辑基于货架预设的轨道导向,配合激光定位传感器(定位精度 ±5mm),能在密集货位间快速移动。在电商仓储场景中,某头部企业引入该设备后,面对日均 2 万 + SKU 的存取需求,货位切换时间从传统穿梭车的 120 秒 / 次缩短至 80 秒 / 次,单日货物周转量提升 32%。同时,该设备适配 1.2-2.5m 深的标准货位,可兼容托盘与料箱两种存储单元,无需更换设备即可满足多品类货物存储,大幅降低仓储设备投入成本。安徽智能四向车
苏州森合知库机器人科技有限公司汇集了大量的优秀人才,集企业奇思,创经济奇迹,一群有梦想有朝气的团队不断在前进的道路上开创新天地,绘画新蓝图,在江苏省等地区的机械及行业设备中始终保持良好的信誉,信奉着“争取每一个客户不容易,失去每一个用户很简单”的理念,市场是企业的方向,质量是企业的生命,在公司有效方针的领导下,全体上下,团结一致,共同进退,**协力把各方面工作做得更好,努力开创工作的新局面,公司的新高度,未来苏州森合知库机器人科技供应和您一起奔向更美好的未来,即使现在有一点小小的成绩,也不足以骄傲,过去的种种都已成为昨日我们只有总结经验,才能继续上路,让我们一起点燃新的希望,放飞新的梦想!

四向车穿梭车的模块化设计贯穿驱动、定位、控制三大主要系统,驱动模块(伺服电机、减速器)、定位模块(激光传感器、编码器)、控制模块(PLC、触摸屏)均采用标准化接口,通过螺栓固定,无需专业工具即可拆卸。在设备维护场景中,某制造企业的仓储车间配备 2 台备用主要模块,当设备出现驱动故障时,维护人员可按 “断电 - 拆卸 - 更换 - 调试” 四步流程操作,30 分钟即可完成模块更换;对比传统设备需拆解整机、耗时 4-6 小时的维护模式,该设计使维护停机时间缩短至 1 小时以内。此外,模块化设计还降低了备件库存压力 —— 企业无需存储完整设备备件,只有需储备 5-8 个主要模块,备件成本降低 60%...
- 重庆四向车 2026-03-27
- 深圳无人四向车行业 2026-03-27
- 苏州工厂四向车解决方案 2026-03-27
- 深圳自动化四向车货叉 2026-03-26
- 广州四向车车 2026-03-26
- 广东电商四向车 2026-03-26
- 广州智能四向车解决方案 2026-03-26
- 深圳化工四向车官网 2026-03-26
- 无人四向车软件 2026-03-09
- 苏州国产四向车官网 2026-03-09
- 广州化工四向车车辆 2026-03-09
- 广州化工四向车智能叉车 2026-03-09
- 深圳工厂四向车货架 2026-03-08
- 广州全自动四向车小车 2026-03-08
- 广州工厂四向车厂家 2026-03-08
- 深圳无人四向车系统 2026-03-08



- 智能自动导航AGV全称 04-12
- 安徽自动导航AGV设备 04-12
- 定制化自动导航AGV 04-12
- 上海电子自动导航AGV 04-12
- 吉林全自动自动导航AGV 04-12
- 安徽自动化自动导航AGV 04-12
- 内蒙古立库自动导航AGV 04-12
- 宁夏电子自动导航AGV 04-12
- 安徽自动导航AGV软件 04-12
- 新能源自动导航AGV设备 04-12