- 品牌
- SOVE
- 型号
- 齐全
- 吸盘类型
- 真空吸盘
- 吸盘形状
- 矩形,圆型,锥形,椭圆形
- 是否库存
- 是
- 是否批发
- 是
- 适用机床
- 车床,钻床,冲床,镗床,锯床,皆可,拉床,折弯机,磨床,剪板机,刨床,加工中心,组合机床,插床,铣床,机器人手
- 产地
- 苏州
- 厂家
- 苏州科硕思机器人科技有限公司
食品级硅橡胶真空吸盘因符合食品接触安全标准,成为食品加工行业的抓取部件,其材质采用医用级硅橡胶(FDA 21 CFR Part 177.2600 认证),无异味、无有害物质析出,在 80°C高温下也不会释放有毒成分。在蛋糕烘焙车间,需抓取刚出炉的蛋糕(温度 60℃,柔软易变形),若使用普通橡胶吸盘,不仅可能析出有害物质污染蛋糕,还因材质过硬导致蛋糕表面凹陷(破损率 8%);而食品级硅橡胶吸盘邵氏硬度 20A,柔软度高,与蛋糕表面接触时可形成均匀负压,避免局部压力过大导致变形,破损率降至 0.5% 以下,且无任何异味残留,符合食品卫生要求。该吸盘表面采用防滑纹理设计,摩擦系数达 0.9,即使抓取表面有奶油的蛋糕,也不会出现打滑现象,抓取成功率达 99.9%。此外,吸盘可耐受 121℃高温灭菌(蒸汽灭菌),每次使用后经灭菌处理可重复使用,使用寿命达 1000 次,比一次性塑料吸盘节省 60% 成本。在巧克力生产线中,该吸盘可抓取不同形状的巧克力(如心形、方形),通过更换不同尺寸的吸盘(直径 20-50mm),适配多种产品规格,无需更换夹爪本体,换型时间从 30 分钟缩短至 5 分钟。某食品厂使用后,食品抓取环节的卫生检测合格率从 95% 提升至 100%,年节省吸盘采购成本约 6 万元。在食品包装线上,真空吸盘满足卫生标准,实现包装袋的高速无菌化搬运。杭州强力真空吸盘

当真空吸盘安装于高速运动的工业机器人末端时,其面临的动力学环境远比固定式自动化设备复杂。在高加速度启停、快速姿态变换过程中,吸盘本体及吸附的工作会受到的惯性力与力矩作用。为此,机械手真空吸盘在结构上进行了深度优化。其背部通常采用铝合金或工程塑料制成的刚性骨架,通过有限元分析进行拓扑优化,在保证比较低重量的同时获得比较大的抗弯与抗扭刚度。这种刚性支撑结构将吸盘橡胶体牢固地约束在设计位置,防止在高心加速度下发生不可控的弹性变形或抖动,从而确保吸盘底面始终与预设抓取平面保持平行。同时,刚性骨架集成了标准化的机器人法兰接口和真空管路接口,确保连接的稳固性与密封可靠性。在一些应用中,背部结构还可能设计有减振元素或质量平衡配置,以抑制特定频率的共振,进一步优化机器人末端的动态性能。这种从静态抓取向动态抓取的思维转变,使得机械手真空吸盘能够充分发挥现代工业机器人的速度潜力,满足日益提升的生产节拍要求。 玻璃真空吸盘配件集成式真空吸盘将发生器、阀组、传感器一体化,大幅节省机器人末端空间。

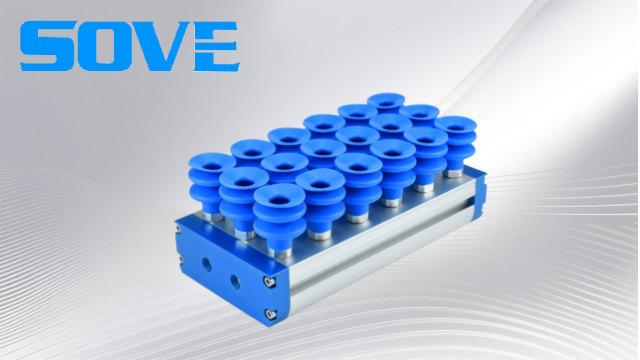
对于汽车覆盖件、飞机蒙皮、家电外壳等具有复杂三维曲面的工件,传统单个大面积吸盘或简单吸盘阵列常因局部泄漏或应力集中而无法可靠抓取。仿形阵列真空夹爪采用工程学设计理念,其基板本身可根据目标工件的CAD数据预先成形为近似曲面。在此基础上,密集排布数十甚至上百单个控制的小型化吸盘单元,每个吸盘的安装角度都经过优化,确保其底面在自然状态下即与工件理论曲面法向对齐。当夹爪靠近工件时,这些小型吸盘单元通过自身的浮动结构或柔韧连接进一步微调,实现与真实曲面的完美贴合。每个吸盘单元连接多个的微型真空通道或分区控制,即使局部区域因曲率突变存在轻微泄漏,也不影响其他区域的牢固吸附。这种设计不仅提供了极高的抓取可靠性和负载分布均匀性,还极大降低了对机器人示教精度和工件来料一致性的要求,在航空航天、汽车制造等领域已成为大型曲面部件自动化搬运的标准解决方案。
在自动化生产线中,工件的尺寸、形状和重量千差万别。采用单一尺寸的吸盘往往无法经济高效地应对所有情况。工业吸盘的模块化尺寸体系为此提供了灵活的解决方案。该体系基于一系列标准尺寸(如直径30mm, 50mm, 80mm, 120mm)和标准接口(如M5, 1/8“ NPT真空接口,统一的安装孔距)来构建吸盘家族。用户可以根据工件的尺寸、重量和形状,像搭积木一样,将多个标准吸盘通过统一的安装板进行组合。例如,搬运大型玻璃板时,可采用多个中型吸盘按矩形阵列分布;抓取长条形工件时,可选用数个小型吸盘直线排列。所有吸盘通过集流管并联,由一个真空源供气。这种模块化方式带来了多重效益:对于设备制造商和终端用户,减少了备件种类,降低了采购与库存成本;在设计和安装阶段,提供了极高的灵活性和可扩展性;在维护阶段,损坏的单个吸盘可更换,不影响整体系统。它本质上是一种通过标准化和组合来应对多样性的系统设计思想,使得真空抓取技术能够以可预测的成本和性能,快速适配于广泛的应用领域。
真空吸盘采用多层复合结构,在应对粗糙及油污表面时仍能保持稳定密封。

在医疗设备、半导体和航空航天等关键行业,任何意外断电都可能导致灾难性后果——正在搬运的高价值工件坠落损坏。气动-电动混合驱动真空吸盘通过创新的能源冗余设计解决了这一安全隐患。该系统采用双能源架构:主能源为常规压缩空气驱动真空发生器;备用能源为高能量密度超级电容器组与微型电动真空泵的组合。在正常工况下,系统由气动驱动,此时超级电容器组处于充电状态;当检测到主气源压力低于阈值或电源中断时,系统在20毫秒内自动切换至电动模式,由超级电容器驱动的微型真空泵维持真空吸附。该真空泵采用无刷直流电机与涡旋式压缩单元,能量转换效率达78%,在满容量下可维持标准吸盘工作30分钟以上。更智能的是,系统集成了重力感知算法,当检测到工件价值等级较高或掉落风险系数较大时,会自动提高备用能源的保持时间。实际测试表明,在突然断电的情况下,混合驱动系统能保证机器人在5分钟内完成当前抓取循环并将工件安全放置,而传统纯气动系统在断电。这种混合设计虽然增加了约15%的成本,但对于搬运单件价值超过10万美元的航空发动机叶片或晶圆而言,其投资回报率是显而易见的。该技术不仅提供了安全冗余,更重要的是。 真空吸盘作为机器人末端柔性执行器,能够实现高效无损搬运,极大降低工件表面损伤风险。浙江圆形真空吸盘厂家批发价
包装袋真空吸盘通过特殊表面纹理和气流设计,可稳定抓取各种塑料、铝箔等软性包装材料。杭州强力真空吸盘
在同时抓取单独工件(如一组电池、多个小零件)的应用中,传统共用一个真空腔室的夹爪存在“一损俱损”的风险:一旦某个吸盘因工件表面缺陷、异物或破损而发生泄漏,整个系统的真空度会迅速下降,可能导致所有工件同时脱落。具备腔室隔离功能的真空夹爪通过内部物理分隔,为每个吸盘或每组吸盘建立的真空通道和腔室。每个腔室由微型真空发生器或通过真空源配合电磁阀和真空传感器进行控制。这样,任何一个吸盘单元的失效都会被其对应的传感器检测到,并且泄漏被严格限制在该腔室内,不会影响其他腔室的正常工作。系统控制器可据此立即做出响应,如报警、记录缺陷位置、或指令机器人将已牢固抓取的其他工件安全放置。这种设计不仅大幅提升了多工件搬运的整体成功率,也为实现“选择性抓取与放置”的复杂逻辑提供了硬件基础,是实现高可靠性、智能化分拣与码垛。杭州强力真空吸盘
苏州科硕思机器人科技有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在江苏省等地区的机械及行业设备中汇聚了大量的人脉以及**,在业界也收获了很多良好的评价,这些都源自于自身的努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同苏州科硕思机器人科技供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!

在高速搬运场景中,传统的分体式吸盘(即吸盘通过长气管连接阀岛)逐渐暴露出响应滞后、压力损失的缺点。为此,集成化真空吸具系统应运而生。这类系统采用模块化设计,将吸盘接口、真空发生单元和控制阀直接整合在一个机械结构内,形成即插即用的智能抓取模组 -6。例如在木材加工或家电组装行业,工件尺寸变化较大,操作人员可以根据实际需求,快速在吸具框架上增减吸盘数量,而无需更改复杂的管路布局。由于真空源就在吸盘根部,真空建立的速度极快,且能耗更低。这种设计理念不仅简化了自动化集成的难度,也让末端执行器的维护变得更加简单直观 -6针对软质、不规则的包装袋,专门设计的扁平宽口吸盘能快速贴合并吸附,避免物料变形或破损...
- 绍兴附近哪里有真空吸盘哪家便宜 2026-04-26
- 黄浦区真空吸盘厂家现货 2026-04-26
- 圆形真空吸盘常见问题 2026-04-25
- 苏州工业真空吸盘厂家批发价 2026-04-25
- 盐城多功能真空吸盘 2026-04-25
- 锥形真空吸盘哪家便宜 2026-04-25
- 开袋真空吸盘 2026-04-24
- 盐城真空吸盘厂家批发价 2026-04-24
- 苏州真空吸盘厂家直销 2026-04-24
- 扬州自动化真空吸盘生产厂家 2026-04-24

- 南京锥形真空吸盘厂家批发价 2026-04-23
- 扬州国内真空吸盘厂家批发价 2026-04-23
- 泰州真空吸盘厂家现货 2026-04-23
- 黄浦区新能源真空吸盘厂家批发价 2026-04-23
- 比较好的真空吸盘用户体验 2026-04-23
- 徐州真空吸盘批量定制 2026-04-23






- 广西半自动气动配件哪里买 05-07
- 珠海固定气动配件询问报价 05-07
- 台州重型气动配件怎么用 05-07
- 河北加工气动配件按需定制 05-07
- 吉林附近哪里有气动配件哪里买 05-07
- 嘉兴什么气动配件批发厂家 05-07
- 珠海比较好的气动配件解决方案 05-07
- 辽宁库存气动配件采购信息 05-07
- 天津国产气动配件零售价格 05-07
- 安徽附近气动配件怎么用 05-07