软件算法引擎是瑕疵检测系统的 “大脑”,其性能优劣决定了系统的智能化水平与鲁棒性。在实际生产中,瑕疵形态多样、背景复杂,且存在大量伪影干扰,传统算法难以应对。现代 AI 瑕疵检测系统融合了深度学习、迁移学习与小样本学习等前沿技术。通过对海量正负样本的训练,模型能自动提取纹理、形状、灰度等高阶特征,实...
瑕疵检测系统基本参数
- 品牌
- 熙岳智能
- 型号
- 瑕疵检测系统
- 适用范围
- 零件瑕疵显微检测系统
- 产地
- 中国南京
- 厂家
- 南京熙岳智能科技有限公司
瑕疵检测系统企业商机
尽管发展迅速,瑕疵检测系统仍面临诸多挑战。首先是数据难题:深度学习依赖大量标注数据,而工业场景中严重瑕疵样本稀少、收集困难、标注成本极高。解决方案包括小样本学习、迁移学习、生成对抗网络(GAN)合成缺陷数据以及无监督/半监督学习。其次是复杂环境的干扰:光照变化、产品位置微小偏移、背景噪声等都会影响稳定性,需要更强大的数据增强和模型鲁棒性设计。第三是实时性与精度的平衡:在高速产线上,毫秒级的延迟都可能导致漏检,这要求算法极度优化,并与硬件加速紧密结合。技术前沿正朝着更智能、更柔性、更融合的方向发展:如基于Transformer架构的视觉模型在检测精度上取得突破;3D视觉与多光谱融合检测提供更丰富的维度信息;云端协同的边缘计算架构实现模型的持续在线学习和更新;以及将检测系统与数字孪生技术结合,实现虚拟调试和预测性维护。实时报警功能能在发现缺陷时立即提示操作人员。无锡零件瑕疵检测系统品牌

现代瑕疵检测系统不仅是“探测器”,更是“数据发生器”。每时每刻产生的海量图像、缺陷类型、位置、尺寸、时间戳等信息,构成了宝贵的质量数据金矿。有效管理这些数据需要可靠的存储方案(如本地服务器或云存储)和结构化的数据库。而更深层的价值在于分析:通过统计过程控制(SPC)图表,可以监控缺陷率的实时趋势,预警异常波动;通过缺陷帕累托图,可以识别出主要的问题类型,指导针对性改善;通过将缺陷位置信息与生产设备参数、环境数据(温湿度)进行时空关联分析,可以追溯缺陷产生的根本原因,例如发现特定模具磨损或某段环境波动导致缺陷集中出现。更进一步,利用大数据和机器学习技术,可以建立质量预测模型,在缺陷大量发生之前就调整工艺参数。因此,检测系统需配备强大的数据分析和可视化工具,并能与企业其他信息化系统(如MES、ERP)打通,使质量数据真正融入企业的全价值链管理,驱动持续改进与智能决策。榨菜包瑕疵检测系统技术参数卷积神经网络(CNN)是当前主流的检测架构之一。

瑕疵检测系统的应用场景比较多,不同行业因其产品特性、生产工艺和质量标准的不同,对系统提出了差异化的技术需求。在电子制造业,如半导体晶圆和印刷电路板(PCB)的检测中,精度要求达到微米甚至纳米级别,需要使用超高分辨率的显微镜头和极其稳定的照明系统,检测内容包括线路的短路、断路、线宽线距偏差以及微小的颗粒污染。在金属加工与汽车行业,检测对象可能是轧制钢板、铝合金轮毂或发动机缸体,缺陷多为划痕、凹坑、锈斑或装配瑕疵,环境往往伴有油污、水渍和反光,因此需要采用抗干扰能力强的多光源组合(如低角度光、同轴光、背光)和3D视觉技术来克服强反光并获取深度信息。在食品与药品包装行业,检测重点在于包装的完整性(如漏液、胀袋)、标签印刷的正确性、以及有无异物混入,这关系到生命安全,因此对检测可靠性的要求极高,且需符合严格的卫生标准(如采用不锈钢外壳、易清洁设计)。而在纺织业,系统则需要擅长分析柔软、易变形材料的不规则纹理,检测色差、断经、纬斜、污渍等,对颜色还原度和纹理分析算法要求苛刻。这种行业特性的深度理解,是设计有效检测方案的前提。
评估一个瑕疵检测系统的性能,需要客观的量化指标。这些指标通常基于混淆矩阵(Confusion Matrix)衍生而来,包括:1)准确率:正确分类的样本占总样本的比例,但在正负样本极不均衡(瑕疵样本极少)时参考价值有限。2)精确率(查准率):所有被系统判定为瑕疵的样本中,真正是瑕疵的比例,反映了系统“报准”的能力,误报率高则精确率低。3)召回率(查全率):所有真实瑕疵中,被系统成功检测出来的比例,反映了系统“找全”的能力,漏检率高则召回率低。4)F1分数:精确率和召回率的调和平均数,是综合平衡两者能力的常用指标。在定位任务中,还会使用交并比(IoU)来衡量预测框与真实框的重合度。此外,ROC曲线和AUC值也是评估分类模型整体性能的重要工具。在工业场景中,还需考虑系统的吞吐量(单位时间处理件数)、稳定性(长时间运行的性能波动)、鲁棒性(对产品正常外观波动的容忍度)以及误报成本与漏报成本。通常,需要根据具体应用的风险权衡精确率与召回率:在安全关键领域(如医药),宁可误报也不可漏报;而在追求效率的场合,可适当容忍一定漏报以降低误报带来的停机成本。建立标准化的测试数据集和评估流程是保证系统性能可信的关键。遮挡和复杂背景是实际应用中需要解决的难题。

机器视觉是瑕疵检测系统的“眼睛”与“初级大脑”,它通过光学成像系统获取目标的数字图像,并利用计算机进行处理与分析,以提取所需信息。一个典型的机器视觉检测单元包括照明系统、镜头、工业相机、图像采集卡(或直接使用接口如GigE Vision、USB3 Vision)、处理硬件(工控机、嵌入式系统或智能相机)及控制软件。照明设计是成败的关键第一步,其目的在于凸显感兴趣的特征(如划痕、凹坑)而抑制背景干扰,常用方式有明场、暗场、同轴、背光及结构光等,需根据被测物材质、表面特性与瑕疵类型精心选择。镜头则负责将目标清晰成像于相机传感器上,其分辨率、景深、畸变等参数直接影响图像质量。工业相机作为光电转换**,其传感器的尺寸、像素分辨率、帧率、动态范围及信噪比决定了系统捕获细节的能力。图像采集与处理硬件负责将海量图像数据高速、可靠地传输至处理器,并执行后续复杂的运算。整个机器视觉链路的每一环节都需协同优化,以确保为后续的瑕疵分析算法提供稳定、高信噪比的输入图像。图像预处理是提升检测精度的关键第一步。浙江压装机瑕疵检测系统公司
自动化检测明显减少了人工检查的成本和主观性。无锡零件瑕疵检测系统品牌
深度学习,尤其是卷积神经网络,彻底改变了瑕疵检测的范式。与传统依赖手工特征的方法不同,深度学习能够从海量数据中自动学习瑕疵的深层、抽象特征,对复杂、不规则的缺陷(如细微裂纹、模糊的污损)具有更强的识别能力。突破体现在几个方面:首先,少样本学习(Few-shot Learning)和迁移学习技术,能够在标注样本有限的情况下快速构建有效模型,降低了数据准备成本。其次,生成对抗网络(GAN)被用于生成难以获取的瑕疵样本,或构建异常检测模型——学习正常样本的特征,任何偏离此特征的区域即被判定为异常,这对未知瑕疵的发现具有潜力。再次,视觉Transformer架构的引入,通过自注意力机制更好地捕捉图像的全局上下文信息,提升了在复杂背景下的检测精度。然而,深度学习仍有局限:其“黑箱”特性导致决策过程难以解释,在可靠性要求极高的领域(如航空航天)应用受阻;模型性能严重依赖训练数据的质量和代表性,数据偏差会导致泛化能力不足;此外,复杂模型需要巨大的计算资源,可能影响实时性。因此,当前最佳实践往往是深度学习与传统机器视觉方法的融合,以兼顾性能与可靠性。无锡零件瑕疵检测系统品牌
与瑕疵检测系统相关的文章

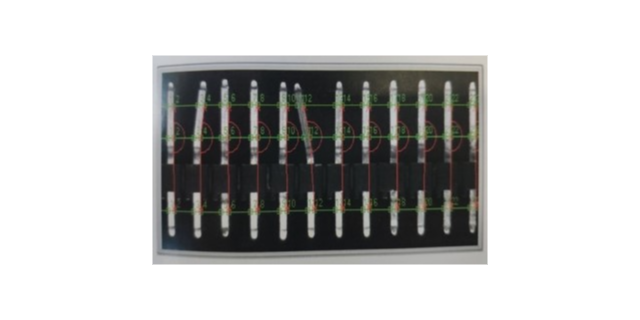
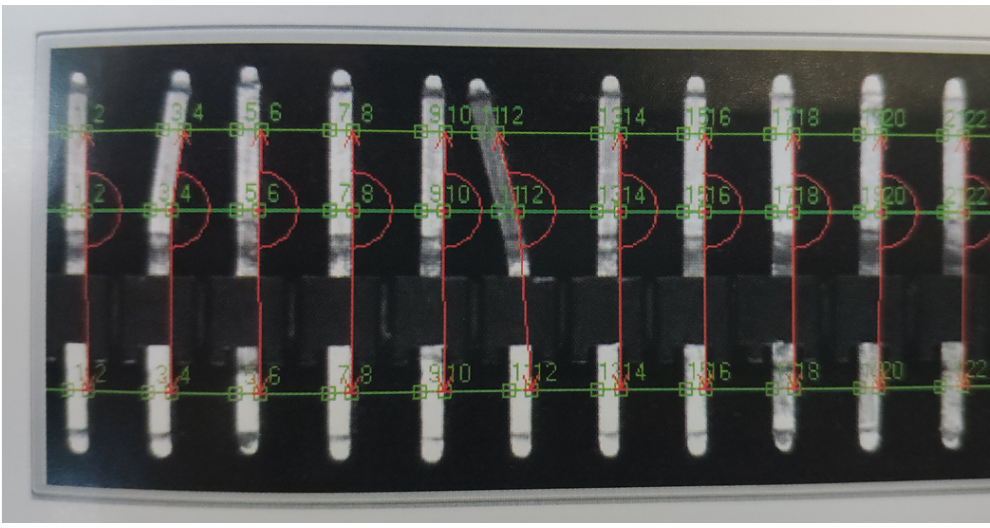
天津电池片阵列排布瑕疵检测系统品牌
- 杭州线扫激光瑕疵检测系统价格 2026-04-29
- 江苏冲网瑕疵检测系统私人定做 2026-04-29
- 盐城电池瑕疵检测系统功能 2026-04-29
- 广东铅酸电池瑕疵检测系统服务价格 2026-04-28
- 南通铅板瑕疵检测系统价格 2026-04-28
- 浙江电池瑕疵检测系统案例 2026-04-28
- 杭州榨菜包瑕疵检测系统趋势 2026-04-28
- 山东铅酸电池瑕疵检测系统供应商 2026-04-28
- 江苏电池片阵列排布瑕疵检测系统定制价格 2026-04-28
- 嘉兴铅板瑕疵检测系统用途 2026-04-28
- 连云港电池片阵列排布瑕疵检测系统功能 2026-04-27
- 北京冲网瑕疵检测系统供应商 2026-04-27
与瑕疵检测系统相关的产品


与瑕疵检测系统相关的新闻
-
广东冲网瑕疵检测系统价格 2026-04-27 14:01:24数据安全与隐私保护,是瑕疵检测系统在数字化时代必须正视的重要挑战。系统在运行过程中会采集和存储大量的产品图像、生产数据,这些数据可能包含企业的重要工艺参数、商业机密。同时,在对接云端进行数据共享与模型训练时,数据传输和存储的安全性至关重要。因此,必须建立严格的数据安全管理制度,采用加密传输、权限分级...
-
上海冲网瑕疵检测系统技术参数 2026-04-26 09:01:19非接触式检测是瑕疵检测系统区别于传统人工的优势之一,尤其适用于精密、易碎、高洁净度要求的产品。在传统人工检测中,接触式操作极易对产品表面造成划伤、压痕或污染,导致二次损伤。而瑕疵检测系统基于光学成像原理,在不与产品表面接触的前提下完成检测,完美保护了工件的原始状态。这一特性对于玻璃面板、精密电子元件...
-
苏州智能瑕疵检测系统功能 2026-04-26 19:01:19数字孪生与瑕疵检测系统的融合,正在重塑智能制造的质量预测与工艺优化模式。通过构建与物理产线实时映射的数字孪生模型,系统可以将检测到的瑕疵数据与虚拟模型进行关联分析,模拟不同工艺参数调整对瑕疵率的影响,从而提前预判生产风险,实现预防性维护与工艺优化。这种虚实结合的方式,不仅能解决当前的质量问题,还能通...
-
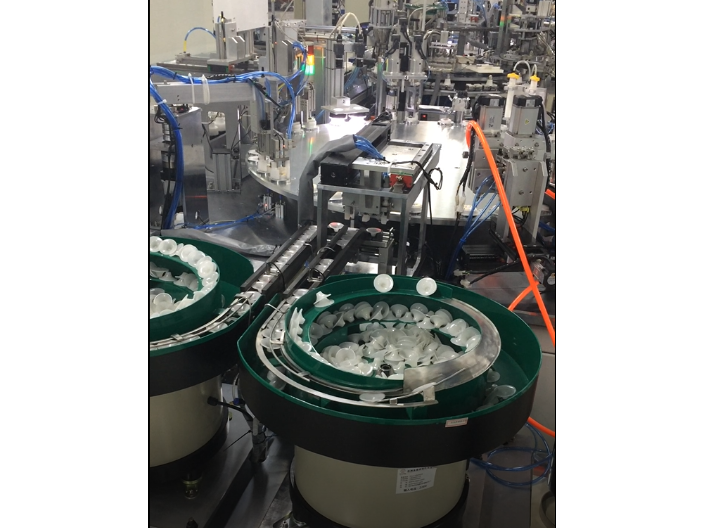
淮安密封盖瑕疵检测系统趋势 2026-04-26 08:01:51在医疗耗材生产中,瑕疵检测系统的应用严格保障医疗耗材的洁净度与完整性,助力医疗安全。医疗耗材如注射器、输液管、口罩、手术器械等,对洁净度、完整性要求极高,其表面的污渍、破损、变形、异物混入等瑕疵,会引发医疗风险,威胁患者生命安全。传统人工检测易带来污染,且难以识别微小破损、异物等缺陷,无法满足医疗耗...
与瑕疵检测系统相关的问题
新闻资讯
产品推荐
-
湖北机器视觉检测
2026-05-06 -

河南草莓智能采摘机器人优势
2026-05-06 -

浙江一种智能采摘机器人定制
2026-05-06 -

吉林农业智能采摘机器人解决方案
2026-05-06 -

福建自制智能采摘机器人解决方案
2026-05-06 -

供应智能采摘机器人用途
2026-05-06 -

安徽制造智能采摘机器人定制价格
2026-05-06 -
山东电池定制机器视觉检测服务制造价格
2026-05-06 -
安徽智能定制机器视觉检测服务产品介绍
2026-05-06