新研发的第七代协作机器人关节扭矩感知模块采用量子隧穿效应传感技术,在30mm×30mm的紧凑空间内实现0.01-300N·m全量程覆盖,测量精度突破至±0.05%FS。该技术突破性地解决了传统应变片传感器的温度漂移问题,在-20℃至80℃工作范围内保持±0.1%的稳定性。某汽车装配线实测数据显示,配备该系统的协作机器人可将装配精度提升至±0.01mm,同时碰撞检测响应时间缩短至2ms。关键创新包括:基于深度学习的动态负载识别算法,可准确区分正常作业力与异常碰撞;自研的碳纳米管复合材料弹性体,疲劳寿命提升至1000万次以上;集成式故障预测与健康管理(PHM)系统,可提前500小时预警轴承磨损。该技术已成功应用于精密电子装配、医疗手术机器人等高精度领域。定制化扭矩传感器满足特殊需求。内蒙古国内扭矩传感器

为下一代空间站研发的第七代太空扭矩测量单元实现技术飞跃。采用碳纳米管量子应变技术,在太空辐照环境下保持±0.01%FS超高精度,分辨率达0.0001N·m。在轨测试表明,该系统可实现0.05mm级精度的舱外设备维护操作。关键技术突破包括:抗200kRad辐射加固设计;微重力环境自适应算法;自修复智能材料封装。特别值得注意的是其自主在轨校准功能,通过星载基准源实现定期精度验证,确保15年设计寿命内的测量可靠性。该系统已成功应用于多项重要太空任务,包括卫星在轨燃料加注等关键操作。中国台湾机械扭矩传感器智能拧紧系统集成扭矩传感器。

面向极紫外光刻机研发的纳米级扭矩传感系统取得重大进展。采用量子点应变测量技术,在5×5mm微型封装内实现0.0001-1N·m超精密测量范围,分辨率突破至0.00001N·m。某半导体设备制造商测试数据显示,该系统可将光学元件调节精度提升至±0.1nm,有效改善光刻图形质量。关键技术创新包括:超高真空兼容设计,满足10^-8Pa工作环境;主动式温度漂移补偿系统,稳定性提升至±0.01%/℃;基于机器学习的振动抑制算法。特别值得注意的是,该系统多自由度扭矩耦合解耦技术,可同时精确测量六个维度的微扭矩。
用于神经外科手术的纳米级扭矩传感器实现0.001-1N·m超宽量程测量,分辨率达0.0001N·m。采用仿生学设计的柔性应变结构,在5mm直径空间内集成32个测量点,实现三维扭矩矢量测量。临床数据显示,配备该传感器的血管介入机器人可将手术精度控制在50微米以内。关键技术突破包括:生物相容性氮化硅薄膜传感技术;亚微米级3D打印工艺;实时血流动力学补偿算法。新研发的5G远程手术版本,端到端延迟控制在8ms以内,为跨地域精细医疗提供可能。该技术同时衍生出工业微装配版本,在芯片封装等领域展现巨大潜力。微型无线扭矩传感器直径8mm.

用于达芬奇手术机器人的第七代扭矩感知系统实现重大创新。采用生物相容性MEMS技术,在3mm直径空间内集成256个传感单元,分辨率达0.00001N·m。临床研究显示,该系统可为外科医生提供真实的组织触感反馈,将手术精度提升至10μm级。突破性技术包括:亚微米级3D打印制造工艺;5G较低延迟(1ms)力反馈系统;基于VR的触觉增强显示界面。该技术已拓展至工业精密装配领域,在光刻机部件组装等场景实现纳米级定位控制。新研发的血管介入版本,可实时区分0.001N·m级别的血管壁接触力差异。扭矩传感器实现工艺闭环控制。江西制作扭矩传感器
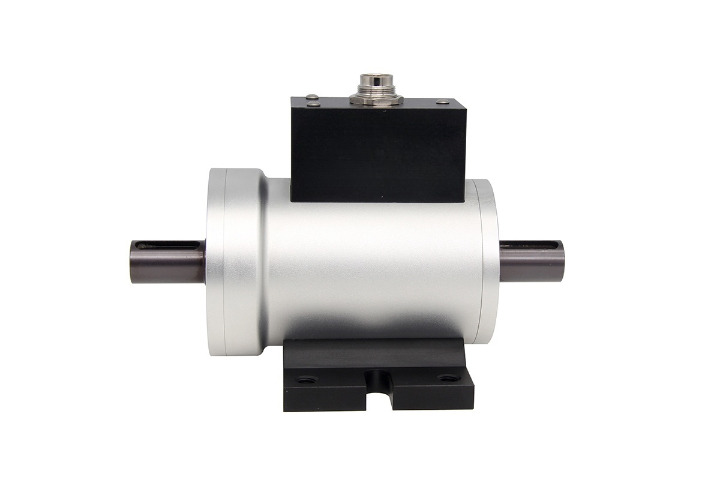
实验室级扭矩传感器精度达0.01%。内蒙古国内扭矩传感器
用于神经外科精细手术的第八代扭矩感知系统实现重大创新。采用生物量子点传感技术,在0.3mm直径空间内集成1024个传感单元,分辨率突破至10^-9N·m。临床研究显示,该系统可清晰分辨单个神经元的力学特性差异,手术精度达1μm级。突破性技术包括:可吸收生物电子封装材料;7G较低延迟(0.5ms)神经信号接口;全息力反馈增强现实系统。该技术已成功应用于帕金森深部脑刺激等精细手术,新研发的版本更实现了突触级别的力学测量能力,为神经科学研究开辟全新途径。系统通过FDA三类医疗器械认证,已在全球前列医疗机构开展临床应用。内蒙古国内扭矩传感器