立体空间防护传感器在自动化饲料包装线中用于检测缝包机前的料袋位置。饲料包装袋在灌装后由传送带送至缝包机进行封口。传感器安装在缝包机入口前方500毫米处,检测料袋是否到达预定位置。料袋到达时光束被遮挡,传感器输出信号触发缝包机启动。缝包机针头在料袋移动过程中完成缝合,料袋通过后传感器光束恢复导通,缝包机停止运行等待下一个料袋。传感器采用对射式光电原理,发射器与接收器分别安装在传送带两侧支架上。饲料车间粉尘浓度较高,普通光电传感器窗口容易积尘导致信号衰减。该传感器窗口配备雨刮式自清洁装置,每隔30分钟刮擦一次窗口表面。雨刮片材料为硅橡胶,动作由微型电机驱动。清洁周期可根据现场粉尘情况通过拨码开关调整,分为15分钟、30分钟、60分钟三档。传感器外壳防护等级为IP65,供电电压为24伏直流。输出形式为继电器触点,触点容量为3安培。安装支架为镀锌钢板冲压件,可沿垂直方向调节200毫米范围。维护人员每周检查雨刮片磨损情况,刮片边缘出现毛刺时更换。接线盒内设有透明观察窗,用于观察继电器动作状态指示灯。多信号交互能力,与生产线设备智能协同,提升效率。浙江激光防护传感器灵活检测
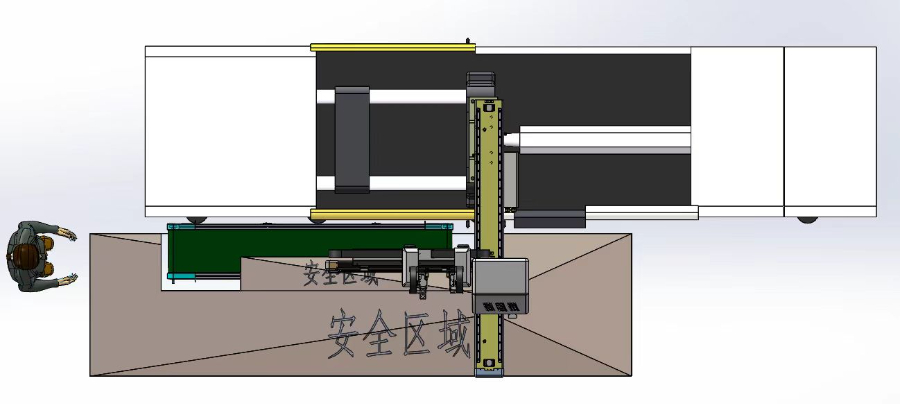
过去的安全防护多停留在平面光栅或二维视觉检测,存在检测盲区,难以应对复杂立体空间内的安全隐患。大德恒通防撞传感器采用3D立体空间成像技术,可快速生成被测场景的三维图像,重复精度稳定一致。用户可根据实际需求,自定义设置防护区域的长、宽、高,实现真正的“空间立体防护”。无论是正上方安装、侧上方安装,还是倾斜20°-55°角安装,传感器均能稳定适配,检测距离可达3-6米。在龙门机械手、桁架机械手等大型设备应用中,这种立体防护能力尤为关键——它能够覆盖机械臂下行的全部运动轨迹,确保任何角度的人员误入都能被及时检测。防撞传感器还可与围栏、安全光栅、门锁等传统防护设备搭配使用,形成更加***的安全防护体系,且不占用额外空间。湖南立体安全传感器智能调节冗余安全回路设计,单点故障仍可保护!

轨道交通站台、检修库、车辆段等场所,存在列车与人员之间的碰撞风险。传统解决方案依赖人工瞭望或地面感应线圈,存在盲区且响应慢。大德恒通防撞传感器可部署在站台边缘、检修地沟、列车进出通道等关键位置,实时检测是否有人员进入危险区域。一旦检测到入侵,立即输出报警信号联动列车制动系统或站台声光报警器。传感器支持多区域设置,可区分站台候车区、轨道作业区等不同风险等级区域,对不同区域设置不同的报警阈值。其IP65防护等级和宽温工作特性,能够适应户外轨道交通环境的严苛要求。
立体空间防护传感器在玻璃搬运机器人中的应用体现在破损检测功能上。玻璃板材在搬运过程中容易因边角碰撞而产生裂纹。传感器安装在机器人吸盘架的四个角落,测量玻璃边缘与吸盘架边框之间的距离。当玻璃边缘某处距离传感器数值突然增大时,说明该处玻璃出现缺角或碎裂。机器人收到信号后停止搬运动作,将玻璃板材放置在**近的下料台上。同时控制系统记录该板材的位置信息,便于后续人工检查。传感器采用红外对射方式,发射端与接收端分别安装在吸盘架的两侧。玻璃板材边缘通过时光束被遮挡,接收端信号消失。板材边缘位置发生变化时,光束重新导通。这种检测方式不接触玻璃表面,避免划伤或施加额外应力。传感器外壳使用聚碳酸酯材料,韧性较好且透明度高。维护人员每班次开始时使用标准测试片验证传感器功能,将测试片插入光路中观察输出信号变化。供电电压为12伏直流,输出信号接入机器人的安全输入端子。在玻璃堆垛工序中,传感器还用于确认每一层玻璃之间是否放置了隔垫。隔垫缺失时传感器检测到的距离特征与正常状态不同,机器人会暂停并发出提示。故障自诊断功能,异常状态实时报警,杜绝隐蔽失效。

防撞传感器的检测距离直接影响其适用场景。大德恒通产品在3-6米范围内均可稳定工作,用户可根据设备大小和安装高度灵活选择。在较远距离(如6米)时,传感器仍能保持足够的分辨率以识别人员入侵;在较近距离(如2-3米)时,则可实现更高的检测精度,甚至可以识别肢体部位的局部入侵。这种“远可覆盖、近可精细”的特点,使得同一款传感器既能用于大型龙门机械手,也能用于小型协作机器人。产品选型表中还提供了不同型号(如DRF-AI30-S3、DRF-AI30-Z3等)供用户根据实际检测距离需求选择,确保性能与场景的比较好匹配。龙门机械手、桁架机械手理想之选,立体防护无盲区。江苏机器人防护防撞传感器技术指导
大德恒通深耕防护技术,防撞传感器快速响应隐患,助力智能制造高效推进。浙江激光防护传感器灵活检测
协作机器人工作区域中,立体空间防护传感器为智能决策提供支持。传感器内部集成算法,能够直接输出通行、减速或停车等控制信号,不需要外部控制器进行额外运算。传感器实时采集周围空间的点云数据,这些数据描述了人员或物体在三维空间中的位置和轮廓。内置处理器分析点云信息,判断目标与机器人之间的**小距离。根据距离数值,处理器决定输出何种控制信号。距离大于安全作业区时输出通行信号,机器人保持设定速度运行。距离进入预警区时输出减速信号,机器人速度降低至原速度的百分之三十。距离进入危险区时输出停车信号,机器人运动完全停止。整个处理过程在传感器内部完成,从信号采集到决策输出用时小于30毫秒。这种架构缩短了感知到执行的链条长度,提高了响应速度。传感器的决策阈值可通过外部调试软件设定。操作人员根据现场情况调整三个区域的边界距离。浙江激光防护传感器灵活检测
深圳市大德恒通科技有限公司在同行业领域中,一直处在一个不断锐意进取,不断制造创新的市场高度,多年以来致力于发展富有创新价值理念的产品标准,在广东省等地区的机械及行业设备中始终保持良好的商业口碑,成绩让我们喜悦,但不会让我们止步,残酷的市场磨炼了我们坚强不屈的意志,和谐温馨的工作环境,富有营养的公司土壤滋养着我们不断开拓创新,勇于进取的无限潜力,深圳市大德恒通科技供应携手大家一起走向共同辉煌的未来,回首过去,我们不会因为取得了一点点成绩而沾沾自喜,相反的是面对竞争越来越激烈的市场氛围,我们更要明确自己的不足,做好迎接新挑战的准备,要不畏困难,激流勇进,以一个更崭新的精神面貌迎接大家,共同走向辉煌回来!