- 产地
- 上海
- 品牌
- 尚晞
- 型号
- 可定制
- 是否定制
- 是
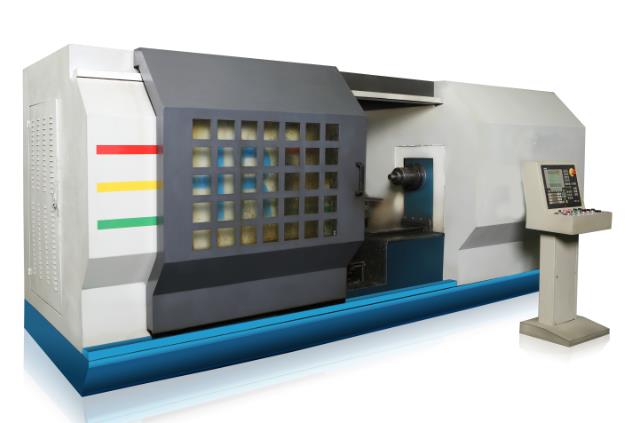
数控旋压机可用于水泥罐车,汽油储油罐两头封头的旋压,因为体积比较大,厚度厚,人工没有办法进行旋压,一般都运用机器进行作业。两头封头进行旋压后,提高了罐内的压强,添加罐体的强度和密封作用。在大型旋压没有进入工业运用时,都运用焊接的方法,焊接的过程中,都有沙孔,液体会经过沙孔流出,因而对焊接的要求就十分高,一般焊接油罐的合格率很低,质量欠好。有了数控旋压机之后,可以进行大型旋压件的旋压制作,减少了油罐焊接的部位,因此油罐的合格率也得到了**的提高。 数控旋压机开辟了金属加工的一个新领域。华南数控旋压机选型

旋压机发展历程。我国的旋压机技术始于六十年代初期,经过几十年 的努力,我国在旋压机技术设备和旋压机工艺理论基础研究方面(如旋压机过程的应力-应变有限元分析、新工 艺新方法及理论的探索研究)取得了很多的进展,使得旋压机技术应用日益很广,但仍不能适应我国国民经济 发展的需要,特别是在理论研究方面至今仍然是一个薄弱环节,这已成为影响我国**次设备使用效率和旋压机 工艺进一步推广应用的制约因素。因此,加强旋压机成形技术的理论研究,建立系统的基础性资料,是我国旋压机技术发展中的一项重要内容。 华中数控旋压机技术参数数控旋压机在设计时需要考虑操作者的操作习惯。

选购旋压机需要注意的因素:根据产品的尺寸来选择数控旋压机 如果产品直径超过1米,重量大,通常需要两人上料或使用起重机上料,客户应该考虑机器是否方便吊机吊装金属圆片,如果数控旋压机的结构设计不适合材料的吊装,容易影响生产效率。如果产品的高度超过400mm,需要考虑数控旋压机床的主轴和尾顶中心距是否能够有空间方便脱模。这个在设计数控旋压机是就要将这些因素一并考虑进去。尚晞数控可接受客户的个性化需求,为客户定制数控旋压机。
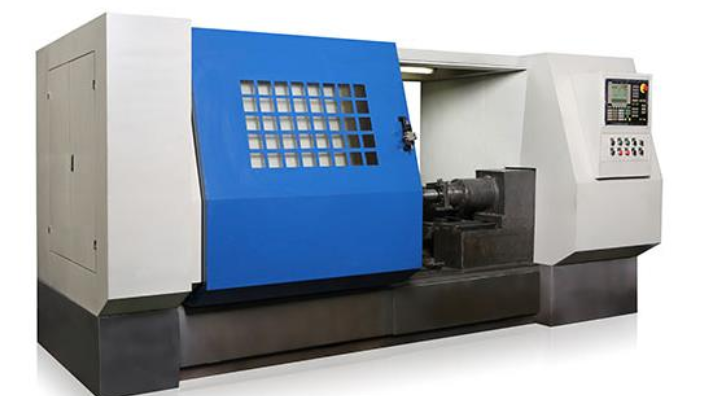
数控旋压机的旋轮座有整体式和开式结构,整体式通常是将各旋轮装在同一个框架机构上,各旋轮轴向运动采用同一信号控制、同一动力驱动,排除了同步误差,可在大旋压力状态下稳定工作。开式结构具有较高的灵活性,可实现多轮多路径同步旋压,在普旋和**设备中较多采用开式结构,缺点是刚性较差,旋压力不能太大,旋轮头较易震动。旋轮头根据安装旋轮个数有单轮、双轮、三轮、多轮几种,尚晞数控旋压机上可实现自动换旋轮。单轮机构简单、使用灵活方便,双轮、三轮及多轮可在一道次旋压中通过错距旋压实现多次变薄,提高生产效率。 数控旋压机可以通用吗?
旋压成型和冲压拉伸成型的区别和优势(一)
原理区别:旋压成型是由刀轮行走的路径来控制料片的流动和变形,而拉伸冲压成型过程是通过上下凸凹模的配合控制料片流动。
模具区别:做相同的-个五金成型产品,旋压成型只需要制作一个芯模 ,而拉伸冲压成型需要制作凸凹两个模具,模具的制造成本通常是旋压的3-6倍,同时旋压模具的制造周期比拉伸冲压模具制作周期短,尺寸更容易修改。
用料区别:旋压变薄率通常约30%,拉伸冲压变薄约10%,变薄率相对更大,而拉伸冲压需要5-1 0mm左右的压边料,所需的材料成本要大。
灯具数控旋压机是单旋轮数控旋压机。五金数控旋压机推荐
旋压技术可分为普通旋压和强力旋压两种。华南数控旋压机选型
数控旋压机常见问题及解决办法(一)
一、旋压机尾顶跳动的几大原因,怎么解决?
旋压机床的尾顶容易产生跳动,以下是机床尾顶产生跳动的几大原因及相应的解决方式。
1.操作机床失误,刀轮撞到尾顶轴,导致尾顶轴变形。
2.尾顶和尾顶轴的精度配合不够高。
3.尾顶轴轴承磨损损坏,尾顶轴转动时会出现异响,
4.主轴模具和法兰装配精度不好,带动尾顶跳动。
二、旋压机主轴在大型强旋过程出现卡滞主要原因
1.旋压模具未减重,模具的质量过大。
2.主轴电机的皮带用的过久变得松弛,调紧预紧力即可。
华南数控旋压机选型
上海尚晞数控科技有限公司创立于2019-05-17 00:00:00,是一家生产型公司。公司业务分为[ "数控旋压轮毂", "数控旋压机", "旋压制品", "高精密数字油缸" ]等,目前不断进行创新和服务改进,为客户提供质量的产品和服务。公司从事机械及行业设备多年,有着创新的设计、强大的技术,还有一批**的专业化的队伍,确保为客户提供质量的产品及服务。公司自成立以来发展迅速,业务不断发展壮大,年营业额度达到200-300万元,未来我们将不断进行创新和改进,让企业发展再上新高。

为什么数控旋压机尾轴的气缸没有动作? 可能是电磁阀发生了损坏,可通过手动操作来判定。具体方法为:同时按住锁模和进退电磁阀,此时尾轴应前进;再松开进退电磁阀,*按住锁模电磁阀,此时尾轴应后退。采用这种方法可判别电磁阀是否已发生故障,也可参照其他电磁阀的指示灯状态来进行判断。 需要说明的是,这种故障一般发生在重装或更换传感器之后,此时传感器轴的位置会与原来的不一样,需要重新校正。具体校正方法为:通过设定数据来调整主轴定向的位置。改变数控旋压机主轴的定位公差值可以校正主轴的停止位置,调整时,要注意输入数据与要校正的方向有关。在校正偏移角度时,主轴的定位公差后的角度值不能为负值。并且,...
- 华东强力数控旋压机厂家直供 2026-05-03
- 智能数控旋压机厂家供应 2026-05-03
- 华东尚晞数控旋压机厂家直供 2026-05-02
- 华南强力数控旋压机点击了解更多 2026-05-02
- 上海数控旋压机多少钱 2026-05-02
- 安徽直销数控旋压机 2026-05-01
- 华中五金数控旋压机优势厂家 2026-05-01
- 华东单轮数控旋压机厂家直供 2026-05-01
- 国产数控旋压机官网 2026-04-30
- 华北灯具数控旋压机 2026-04-29




- 上海数控旋压机报价 2026-04-27
- 数控旋压机优势厂家 2026-04-27
- 华中单轮数控旋压机高性价比 2026-04-27
- 上海五金件数控旋压机 2026-04-27
- 上海尚晞数控旋压机设备 2026-04-26
- 江苏数控旋压机制造厂家 2026-04-26





- 上海尚晞旋压轮毂图片 05-05
- 铸造旋压轮毂工艺介绍 05-05
- 浙江尚晞科技旋压机加工 05-05
- 青浦区什么是旋压机介绍 05-05
- 尚晞数控旋压轮毂官网 05-05
- 铸造旋压轮毂厂家 05-05
- 华南旋压轮毂结构图 05-04
- 上海旋压机原理 05-04
- 华南三片式旋压轮毂推荐 05-04
- 非标高精密数字油缸的厂家 05-04