护线管与输出法兰相连,转速低,减少线缆磨损;7、本发明采用模块化设计,相同关节应用于机器人各关节,各组成部分均可具有互换性,易于维护。附图说明图1是本发明设计柔性的协作机器人模块化关节的结构剖面图;图2是本发明设计柔性的协作机器人模块化关节的输出法兰和护线管;图3是本发明设计柔性的协作机器人模块化关节的谐波减速器;图4是本发明设计柔性的协作机器人模块化关节的制动器组件;图5是本发明设计柔性的协作机器人模块化关节的电机轴;其中1-电机端编码器读数头安装座、2-关节伺服驱动器、3-关节端编码器码盘、4-关节端编码器读数头、5-关节端编码器码盘安装座、6-护线套、7-护线套支架、8-关节端编码器读数头安装座、9-密封圈安装座、10-密封圈、11-电机端编码器码盘、12-电机端编码器读数头、13-关节后盖、14-制动器组件、15-关节壳体、16-电机轴、17-电机组件、18-谐波减速器、19-防尘支架、20-橡胶环、21-护线管、22-输出法兰。具体实施方式具体实施方式一:结合图1至图5说明本实施方式,本实施方式的一种柔性协作机器人模块化关节包括关节壳体15。力控系统可广泛应用于航空叶片、汽轮机叶片、汽车零配件的柔性打磨应用中。宿迁柔性打磨必看

所述套筒21的一端固定于所述传动螺母31上,所述传动螺杆32部分伸入所述套筒21内且所述传动螺杆32与所述套筒21内侧壁间隔设置,所述砂轮安装轴12部分伸入所述套筒21内,所述套筒21内设有凹陷而成的导槽211,所述砂轮安装轴12上设有凸起的导块121,所述导块121设于所述导槽211内。所述进给组件3还包括固定于所述传动螺杆32的远离所述打磨头1一端的手动摇把33。所述支座2还包括前撑杆22,所述前撑杆22包括连接轴承221和三角支架222,所述连接轴承221的上方固定于所述套筒21外壁的靠近所述打磨头1的一端,所述连接轴承221的下方与所述三角支架222相连。所述支座2还包括固定于所述传动螺母31下方的后撑杆23。所述导槽211的靠近所述打磨头1的一侧设有用于限制所述导块121滑出所述导槽211的限位块212。所述弹性件4为压缩弹簧。本实施方式中,一种用于艺术品打磨的柔性打磨机的使用过程如下。当需要对如雕塑等艺术品进行打磨时,将本发明一种用于艺术品打磨的柔性打磨机的前撑杆22和后撑杆23固定放置于艺术品周围,并调节至所需的高度。打磨头1正对艺术品的需要打磨的位置。手握手动摇把33旋转,使传动螺杆32旋转,在传动螺母31的支撑下,向靠近艺术品的方向移动。太仓金属铸件表面柔性打磨全自动柔性打磨抛光生产、可重复编辑、能在三维空间里完成各种打磨、抛光作业。

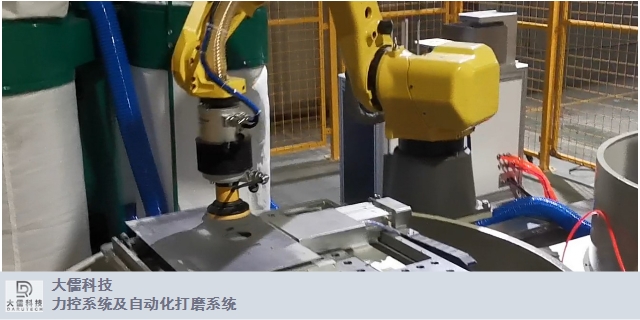
大儒科技成功生产柔性打磨系统的因素之一是大儒科技较多的内部生产。除机器人外,工厂的所有组件均由大儒科技根据自己的概念策略自行开发和制造。这适用于目前多数产品的自动化打磨抛光场景,从单个模块的力控系统、通用型打磨机台、自动换砂纸模块,到可以按需组合的柔性打磨系统。
力控系统功能:
力控系统目前有多个型号,适合不同打磨、抛光工作场景。力控系统柔性打磨过程,可根据工件公差和细微的位置偏移瞬间调整,保持力的大小在设定范围内,保证了表面效果的一致性。与机器人的完美融合,可以明显降低调试门槛,机器人只需执行打磨路径,力控系统调控打磨力,使打磨力可量化,对部分公差或形变较大的钣金、冲压、塑胶件等,仍可保证效果一致,量产可实现性高。
模块化打磨工站
模块化打磨工站适合不同的打磨、抛光工作场景,通用于17寸以下产品,干磨、湿磨两用,可以自动更换砂纸。
柔性打磨系统适合不同的打磨、抛光工作场景,适用于3C、汽配、家居卫浴等行业产品的全自动抛光、打磨,特别适合曲面、弧角、箱体平面等其他设备无法实现的工件环境。
所述传动螺杆部分伸入所述套筒内且所述传动螺杆与所述套筒内侧壁间隔设置,所述砂轮安装轴部分伸入所述套筒内,所述套筒内设有凹陷而成的导槽,所述砂轮安装轴上设有凸起的导块,所述导块设于所述导槽内。推荐的,所述进给组件还包括固定于所述传动螺杆的远离所述打磨头一端的手动摇把。推荐的,所述支座还包括前撑杆,所述前撑杆包括连接轴承和三角支架,所述连接轴承的上方固定于所述套筒外壁的靠近所述打磨头的一端,所述连接轴承的下方与所述三角支架相连。推荐的,所述支座还包括固定于所述传动螺母下方的后撑杆。推荐的,所述导槽的靠近所述打磨头的一侧设有用于限制所述导块滑出所述导槽的限位块。推荐的,所述弹性件为压缩弹簧。与相关技术相比,本发明一种用于艺术品打磨的柔性打磨机通过设置弹性件实现动力的传递,能根据打磨阻力自动调节打磨进给力,实现柔性打磨,提高了打磨质量,同时利于提高打磨设备自身的使用寿命。【附图说明】为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图**是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下。大儒科技是专注柔性打磨机器人的科技生产型企业。

机器人自动化柔性打磨抛光适用于各种类型工件和材料打磨抛光工艺的各个方面,常规复杂形状工件的抛光(如航空叶片,管件,水龙头,精密铸造件等)都需要由人工完成,不仅加工效率低、产品致性难以保证、生产人员工作环境恶劣,同时管理成本较高,随着用工成本和技工不确定性风险的上市,利用人口红利创造产品利润的时代已经结束。自动化加工方式使用先进的技术使得该系统能够处理各种复杂形状的工件,并且保证了工件的加工质量和产品的一致性。通过在机器人上的力反馈传感器以及内置在设备中的**参数库,结合工件与抛光轮之间的磨损消耗计算方程,使得系统能够实现复杂打磨,随形抛或安装三维数模尺寸抛都成为可能。力反馈补偿、自动计算磨损和补偿值,在线质量控制等功能,极大地提高了产品加工效率,并保证了加工工件的质量高度一致性。通过使用机器人自动化单元,不仅将产品质量提高一个档次,而且面对已经到了的高用工成本,技工基本技能不扎实等问题,制造企业都可以轻松应对。目前国际上比较有实力的自动化集成公司主要集中在美国,欧洲和澳洲,亚洲市场上东南亚地区如泰国,马来西亚等国家已经提前开始探索利用机器人自动化加工替代人工。电脑支架柔性打磨用大儒科技的力控系统。太仓金属铸件表面柔性打磨
力控系统适应五金、压铸、塑料、塑胶外壳、铝合金、不锈钢等材质的柔性打磨。宿迁柔性打磨必看
关节端编码器读数头4和电机端编码器读数头12的轴线距离通过垫片调整。本实施方式的谐波减速器通过螺钉安装于关节壳体内,输出法兰通过连接螺钉固定在谐波减速器输出端上;制动器组件的外圈与关节壳体通过螺钉相连,制动器组件的内圈摩擦片通过轮毂与电机轴平键连接;本实施方式的关节壳体采用航空硬质铝合金材料,用于减重;本实施方式靠近电机端安装电机端编码器,用于检测电机位置和速度;靠近驱动板安装关节端编码器用于检测谐波输出端位置和转速;本实施方式的电机轴与谐波减速器输入端通过螺钉连接,电机轴可以根据设计方案要求灵活调整更换,增加设计柔性和多样性;本实施方式的护线套通过护线套支架固定在护线管一端,关节采用中心孔走线,护线管将线缆与电机轴隔离开,有效保护线缆防止磨损;本实施方式的护线管21与关节端编码器码盘安装接座5可以根据设计方案要求灵活配置,增加设计柔性和多样性的同时而不影响输出法兰22。低速护线管21与输出法兰22分体连接,降低加工成本。本实施方式的电机端编码器读数头12与电机端编码器码盘11之间可以通过调整垫片来调整轴向距离,满足不同编码器的使用条件及制造误差带来的影响,增加设计柔性。宿迁柔性打磨必看
大儒科技(苏州)有限公司总部位于方泾路2号,是一家大儒科技主要产品有:力控系统(机器人打磨抛光**),模块化打磨抛光工站、柔性打磨机器人等自动化打磨系统,主要为企业提供自动化打磨抛光系统,自动化上下料系统的研发,设计,销售及完善的售后服务。 货物进出口;技术进出口(依法须经批准的项目,经相关部门批准后方可开展经营活动,具体经营项目以审批结果为准) 一般项目:软件开发;机械设备批发;金属制品批发;电气设备批发;五金产品批发;人工智能双创服务平台;网络与信息安全软件开发;集成电路芯片设计及服务;技术服务、技术开发、技术咨询、技术交流、技术转让、技术推广;智能机器人销售;人工智能硬件销售;智能机器人的研发;电子元器件批发;计算机软硬件及辅助设备批发;人工智能应用软件开发;信息系统集成服务;智能控制系统集成;信息技术咨询服务;信息系统运行维护服务的公司。大儒科技拥有一支经验丰富、技术创新的专业研发团队,以高度的专注和执着为客户提供力控系统,模块化打磨工站,自动化打磨系统,柔性打磨机器人。大儒科技继续坚定不移地走高质量发展道路,既要实现基本面稳定增长,又要聚焦关键领域,实现转型再突破。大儒科技始终关注机械及行业设备市场,以敏锐的市场洞察力,实现与客户的成长共赢。