视觉数粒机突破了传统的方法,物品流以单层平铺状态由料盘整堆输送,无需分为单列通道,整堆下坠时通过取像区域计数。 首代的视觉数粒方法采用补差方式,在整堆计数后,补差装置控制单个物品数量补差以达到目标数量,但难度在于需要控制初次分堆量接近而不超于目标数量,而补差时也需要单列单个地控制物品,其实也是传统多通道方式的一种延伸,也受制于一些原有的问题。 新一代的视觉数粒方法不用对计数后的物品进行补差,物品堆通过一个逻辑分配器,电脑监控物品堆进入分配器时的分布状态,以逻辑计算方法分配出目标数量。上海卫岚与客户共同成就。浙江M3303并列式视觉数粒机

计算机视觉就是用各种成像系统代替视觉作为输入信号,由计算机来 代替人脑来完成、处理和解释。计算机视觉的**终研究目标就是使计算机能类似人那样通过视觉观察和理解世界,具有自主适应环境的能力。要经过长期的努力 才能达到的目标。 因此,在实现**终目标以前,人们努力的终期目标是建立一种视觉系统,这个系统能依据视觉敏感和反馈的某种程度的智能完成一定的任务。计算机视觉学所研究的对象,简单地说就是研究如何让计算机通过图像传感器或其它光传感器来感知、分析和理解周围环境。口碑好M3303并列式视觉数粒机货源充足上海卫岚打破视觉数粒技术国外垄断局面。

机器视觉是通过光学装置和非接触式的传感器,自动地接受和处理一个真实物体地图像,以获得所需信息用于控制机器人运动的装置。机器视觉技术主要采用适合被测物体的多角度光源及传感器获取检测对象地图像,通过计算机从图像中提取信息,进行分析、处理,**终用于实际检测和控制。总的来看,机器视觉是一门涉及机械、电子、光学、自动控制、人工智能、计算机科学、图像处理和模式识别等诸多领域的交叉学科。机器视觉在国外人工智能应用技术中心占比超过40%。
传统的电子数粒机采用多通道输送的方法, 把物品在每条通道排成单列单个输出,并于下坠时触发对应的光电传感器计数。当各通道的累计数量达到目标值时,按序关闭位于传感器下面的**闸门,使物品流按目标数量分堆。但是,一直困扰着这种数粒方法的问题在于:光电传感器需靠近物料工作,其灵敏度易受物料所产生的粉尘影响需要使用一个阵列的传感器来覆盖通道的宽度,传感器之间有一定距离,对于细小物品便有机会发生检测盲区阵列传感器的解像度有限,不能有效辨识破片及碎粒使用多级震盘把物料分布为多列并且分开,需占用较大的平面空间通道闸门需极高速反应,对压缩空气的洁净度要求甚高,闸门反应稍有拖延便可能撞碎物品或导致分堆不准每一条通道只容单个物品通过,通道太小,便不适用于稍大的物品,通道太大,设备体积便按比例增加,检测盲区的机会也随之增加,设备的通用性也就受限上海卫岚视觉数粒设备准确、专业、灵活、智能。

模仿人类的视觉系统,计算机视觉系统中信息的处理和分析大致可以分成两个阶段:图像处理阶段又称视觉处理中的低水平和中水平阶段;图像分析、理解阶段又称视觉处理中的高水平处理阶段。 计算机视觉系统中, 视觉信息的处理技术主要依赖于图像处理方 法,它包括图像增强、数据编码和传输、平滑、边缘锐化、分割、等特 征。物体通过光源和相机之间,由这些数据编码输送到相机数据处理单元,从而在相机上将物料的大体轮廓成像,再将成像数据传输计算机进行运算。上海卫岚视觉数粒设备可以连接各种包装设备。浙江M3303并列式视觉数粒机
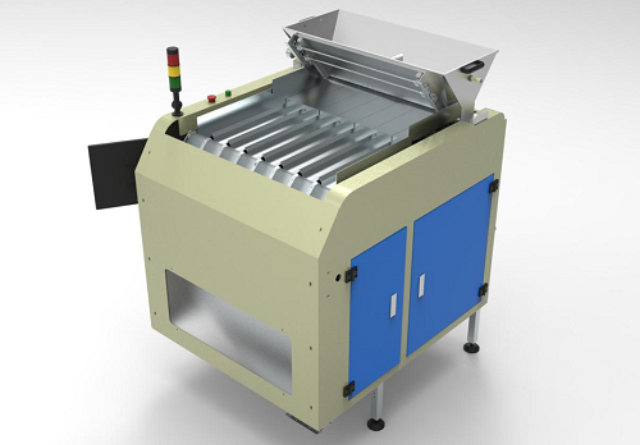
上海卫岚视觉数粒设备效率快、精度高。浙江M3303并列式视觉数粒机
使用数粒机,需要先对种子进行清选,去除种子中的杂质,因为当种子中掺有杂质时,也会在光导管中形成投影而计数,影响数粒结果。还有一个需要注意的地方就是控制或者调节好数种盘的轨道宽度,因为正确的数粒要求种子排成一行,一次落下,落下一粒即产生一个投影,计数为1。如果轨道过于宽大,种子以两粒或者三粒的方式同时落下,则它们由于下落高度相同,种子质量也相差无几,无法区分出他们的下落时间差,结果就是在光导管上只产生了一个投影,错误记数为1粒种子,这时候误差就会产生,所以为了避免这种误差,应实现调节好数粒机的轨道宽度。浙江M3303并列式视觉数粒机