工程车360全景鸟瞰全景驾驶辅助系统(安装360度全景摄像头)通过安装在车身前后左右两侧的四个广角摄像头,同时收集车辆周围的图像,经过图像处理单元校正和拼接,形成一个360度全景的车辆周围,实时传输到中控台的显示设备。通过全景驾驶辅助系统的360度全景视图,驾驶员可以在坐在车内时可视地看到车辆的位置和车辆周围的障碍物,并方便地控制车辆停放到该位置或通过复杂的路面有效减少刮伤。碰撞和摔倒等事故。360度全景倒车影像可更加直观和安全可靠的辅助倒车,给广大车友带来极大的方便,因此必然成为泊车系统的新趋势。工程车360全景系统的产品通过特殊的车规设计,于适应不同车型所处的恶劣的应用环境。挖掘机360全车可视系统
辨别真假360度工程车全景的方法:真的360度工程车全景在驾车时看360度全景画面不头晕,1、不会头晕:看得到保险杠便于参考,地平线以上不少于三分之一,画面稳定;2、画面流畅:没有卡顿,没有拖尾,高速行驶时也流畅自然;3、画面好看:色彩自然,拼接处盲区小,周围物体变形小。假的360度全景,因为四摄像头屡屡对虚焦画面聚焦失败,容易出现头晕。而且因为四个摄像头视角不一致,使得人眼向大脑传达“自己真的在动”这一信息。但大脑却没收到肌肉运动的信号,于是大脑就会发生“知觉错误”矛盾;加上驾车时的平衡感被打乱,人就可可以出现头晕、恶心等不适。压路车360全景影像设备生产厂家工程车360度全景系统在驾车时看360全景画面不会出现头晕的现象。

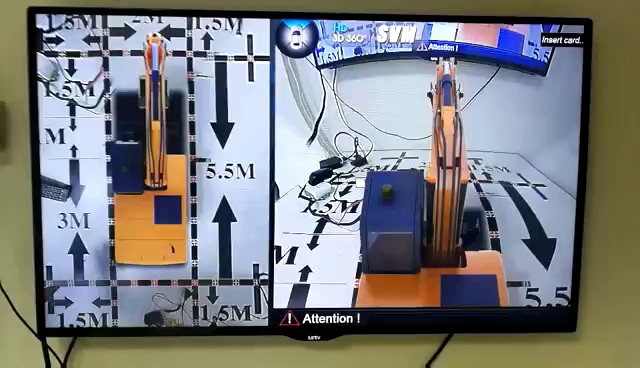
工程车360度全景摄像头、工程车360度全景影像系统、工程车360度全景泊车系统、工程车360度全景可视系统、工程车360度全景倒车影像系统,通过安装在车身前后左右的4个超广角摄像头,同时采集车辆四周的影像,经过精拓专有的“实时图像畸变还原对接技术”对图像进行畸变还原—视角转化—图像拼接—图像增强等处理,较终形成一幅无缝完整的车周全景鸟瞰图。该系统不但可以显示全景图,还可同时显示任一方向的单视图;工程车驾驶员通过配合标尺线能够准确读出障碍物的位置和距离。
辨别真假360工程车全景的方法:视野细节,车子4个车轮都能看到,360全景重要的安全视野就是可以查看车身周围情况,并可根据使用需要切换不同视觉显示,特别是可以同时显示车身的影像,通过狭窄路段时能够避免车辆与旁边障碍物发生刮蹭。好的视野必须可以同时看到车身的四个轮子和安全角。不抢屏,该显示的显示,不该显示的不显示,真正好的360全景,还具有安全启动(零伤害启动):1、延时控制启动显示,延时时长可单独设置;2、有障碍物可以触发全景显示(超声波雷达配合);3、车速不高于设定速度时一直有显示,车速降下来自动启动显示。工程车360度全景系统可以记录各个部位的实时影像。

360度工程车全景摄像头可无盲点监测覆盖面积400左右平方米,设置有一个鱼眼镜头,拥有360度全景视图。一台360度工程车全景摄像头可以取代多台普通的摄像机,做到了无缝监控,实现了监控新应用。可记录停车后一段时间的情况:行车记录仪也有带停车记录功能的,不过时间都不会太长,根据电池电量的大小决定录像时长,普遍在几分钟到一小时左右。而360度工程车全景摄像头则是靠单独外置电源供电保持停车熄火后持续工作。多视角:行车记录仪是安装在前风挡上的,普遍只有一个摄像头,部分品牌记录仪还选装后方摄像头,而360度工程车全景摄像头的产品有四个摄像头,分别可以记录车辆前后左右四个方向的情况。工程车360度全景系统画面流畅。装载机360盲区侦测系统开发商
工程车360全景系统有着完善的全景画面回放。挖掘机360全车可视系统
360度全景影像是一项工程车安全配置,与普通倒车影像系统相比,其中心在于在车头、车侧增加了多个摄像头,通过车载显示屏幕可观看工程车四周360度全景融合,超宽视角,无缝拼接的适时图像信息(鸟瞰图像),了解车辆周边视线盲区,帮助工程车驾驶员更为直观、更为安全地停泊车辆。原理:景物通过镜头生成的光学图像投射到图像传感器表面上,然后转为电信号,经过模数转换装置转换后变为数字图像信号,再送到数字信号处理芯片中加工处理,之后通过USB接口回传给图像处理单元。在图像处理单元中,电脑将对它们进行变形、拼接处理,从而形成一张从车顶鸟瞰的俯视图。这样独特的视角可以很好地帮助缺乏车感的驾驶员去理解自己的走向和位置。挖掘机360全车可视系统
广州精拓电子科技有限公司致力于汽摩及配件,以科技创新实现***管理的追求。精拓电子拥有一支经验丰富、技术创新的专业研发团队,以高度的专注和执着为客户提供360全景影像,防碰撞预警系统,安全辅助驾驶系统,疲劳驾驶预警系统。精拓电子不断开拓创新,追求出色,以技术为先导,以产品为平台,以应用为重点,以服务为保证,不断为客户创造更高价值,提供更优服务。精拓电子创始人陈湘萍,始终关注客户,创新科技,竭诚为客户提供良好的服务。