5G时代即将到来,手机外壳材料从塑胶到金属又到非金属材质的轮回,塑胶因为成本低,受到中低端市场的青睐。塑胶外壳的材料通常主要用ABS、PC、PPO、PCABS等工程塑料、合金与碳纤维或玻璃纤维的复合材料等,由于对手机壳表面要求高,注塑的产品达不到要求,因此需要对手机壳表面打磨抛光,消除塑胶结合纹,模痕,夹水纹,雾面,霜面,毛刺,废边,清洁和修复划痕等,以使塑胶表面纹路均匀,使塑胶手机壳变成表面光滑和有高光泽度的效果。一、手机塑胶中框及后盖制程注塑-打磨抛光-清洗-喷涂/镀膜/电镀等-检查-下个制程二、手机塑胶壳打磨抛光的问题点:1.来料检查,需要对来料仔细检查,有问题需要马上联系上道工序;2.打磨主要问题塌边塌孔:边缘,四个圆角,摄像头,插卡孔、数据线孔、按键孔等地方;3.接刀痕,打磨不圆润;4.打磨痕,打磨痕太粗喷涂遮不住,调整加工程序及更换更细的海绵砂;5.合模线没打磨干净。厦门什么是力控打磨厂家直供
有色金属,狭义的有色金属称非铁金属,是指铁、锰、铬以外的所有金属的统称;广义的有色金属还包括有色合金,有色合金是以一种有色金属为基体,加入一种或几种其他要素而组成的合金。在电脑的主板中金属的含量占大概50%,其中主要的有价金属都是有色金属,有色金属经过切割、冲压、打磨、抛光等工艺加工制成电脑主板上的各种零件。现有的有色金属加工打磨抛光装置存在因管状金属固定不牢固而致使影响抛光和打磨效用。因工业机器人准确、可靠、灵活等优势,越来越多的制造企业正在尝试使用工业机器人进行工件打磨、抛光、去毛刺等工作。然而给工业机器人编写精确复杂的打磨轨迹是一大难点。传统的离线编程解决方案能够解决轨迹编程复杂的问题,但是它要求工件一致性好,工作站标定精确,这使得工业机器人在打磨过程中安装、调试和使用难度依然很大。在打磨过程中引入打磨力控系统提高了工件的打磨质量,加工效率以及设备安全性。唐山什么是力控打磨研磨

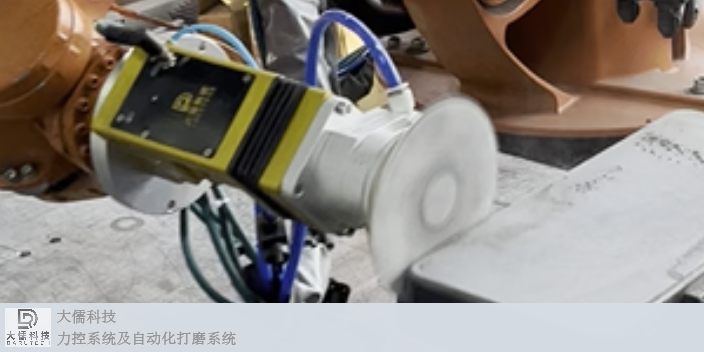
目前我国的打磨抛光方法仍然以手工打磨、手工抛光为主,不仅劳动强度大,加工效率低,对工人技术熟练程度要求高,而且是工人职业病高发领域。因此,自动化打磨抛光设备的大量应用是实现“机械换人”,推动传统制造业实现技术转型升级的重要途径。自动化打磨抛光设备主要由进给系统和打磨抛光头组成,进给系统如关节机器人、直角机器人、并联机构及机床的伺服进给系统等,目前较为成熟和可靠。目前打磨抛光头相对较为粗糙,一般只有打磨抛光的执行机构,缺乏可靠的控制系统和传感系统,无法实现恒力磨削,与进给系统缺乏相互作用、反馈的交互性,无法实时调整,致使现在的自动化打磨抛光设备适应面较窄,无法应对打磨抛光时遇到的各种复杂情况。针对现有技术中存在的上述不足之处,智能柔性打磨力控系统的执行器完成柔性力控制的浮动磨削,通过力控与视觉系统对打磨情况进行感知,反馈给进给系统做出实时调整;采用可自由伸缩的打磨头、被动调整装置、海绵垫等增加打磨效率的同时单、双、三打磨头作业的自由切换可适应有不同需求的场合。
目前,在进行产品加工(如玻璃屏幕等),一般经过清洗、打磨、清洗等工艺,在进行打磨加工,以玻璃屏幕为例,需对其产品边沿轮廓进行加工,尤其是在进行曲屏加工时,需要打磨头配合玻璃屏幕多个角度的加工,以防止出现加工死角的情况。此外,在玻璃屏幕生进行打磨时,可能会经过粗加工、精加工等不同的加工工序,而不同的加工需要不同的加工设备来完成,因而需要将工件转移至不同设备。但是,现有的工件转移通常是通过人工来转移,或者通过机械手进行转移,而在加工工序较多的情况下,不同的设备衔接连贯性较差,导致整个生产过程转移效率低,生产效率低。但是,现有的打磨设备自动化程度较低,且不能对玻璃屏幕进行多角度加工。技术实现要素:为了克服现有技术的不足,智能柔性打磨力控系统安装在机器人上,可以组成全自动打磨加工线,其可同时进行多个工件的打磨作业,且可将不同打磨工序进行衔接,打磨效率高。
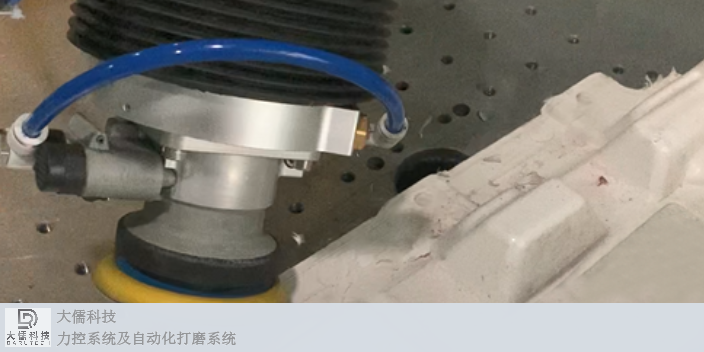
因需要尽可能精确地确定机器人运行路径,编程工作复杂而耗时。传统技术尽管在理论上可获得恒定的研磨抛光质量,然而事实并不尽如人意,加工后的铸件往往前后品质不一,公差各不相同,难以获得稳定的工艺效果。关于复杂构造的工件、毛刺散布分散的工件也能对应。而且机器人具有可编程性,新的产品导入只需求改换工装治具,顺序切换就能完成。这使设备具有更高的柔性化,更合适目前企业的需求。同机遇器人打磨的方案能增加工人休息强度或间接省去工人,无效保证加工质量分歧性,进步全体消费效率,改善工厂任务环境。这些劣势都是明显的,纵使设备投入本钱略高,也越来越多被企业承受。随着机器人力控技术的发展,浮动机构和打磨工具的使用,如同人手滑过工件毛刺般进行柔性去除毛刺,能有效避免造成打磨工具和工件的损坏,吸收工件及定位等各方面的误差。力控软件由二种先进的重点功能组成。一种是压力控制功能,当机器人进行铸件研磨抛光时,该功能可保持打磨工具对工件的压力始终不变:另一种是变速控制功能,当机器人对铸件的表面或分型线进行打磨、去飞边操作时,该功能可持续控制其操作速度,在遇到较大凸起时能自动减速运行。郑州精密力控打磨欢迎选购
厦门什么是力控打磨厂家直供
而且传统的工件清理技术使用位置支配法则,因需尽量准确地确定机器人运转路径,编程工作繁复而耗时。传统技术尽管在学说上可获得恒定的研磨抛光质量,然而实情并不尽如人意,加工后的工件往往前后品质不一,公差各不相同,难以得到安定的工艺效用。关于繁杂结构的铸件、毛刺散布分散的铸件也能对应。而且机器人具可编程性,新的产品导入只需要改换工装治具,次序切换就能完成。这使装置具更高的柔性化,更适当目前企业的需要。同机遇器人去毛刺的方案能增加工友休息强度或间接省去工友,无效确保加工质量分歧性,进步全体消费效率,改善工厂任务环境。这些劣势都是很明显的,纵使装置投入本钱略高,也越来越多被企业背负。随着机械人力控技术的发展,浮动部门和打磨工具的使用,如同人手滑过铸件毛刺般开展柔性除去毛刺,能有效性避免导致打磨工具和铸件的损坏,吸收铸件及定位等各方面的误差。力控系统由二种先进的基本机能构成。一种是压力控制机能,当机器人展开工件打磨抛光时,该机能可维持打磨工具对铸件的压力自始至终不变:另一种是变速控制功用,当机器人对工件的表面或分型线展开去毛刺、去飞边操作时,该机能可持续操纵其操作速度。厦门什么是力控打磨厂家直供




