
- 品牌
- 领先光学技术公司
- 型号
- lxgx-004
本发明的设备再喷涂时将喷涂区域密封,避免了油漆外漏污染汽车表面油漆。附图说明为了更清楚地说明发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图jinjin是发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。下面结合附图和实施例对本发明进一步说明。图1是本发明的一种汽车外漆修补抛光一体机整体结构示意图。图2是图1中仰视图。图3是图1中a-a的结构示意图。图4是图1中b的放大结构示意图。具体实施方式下面结合图1-4对本发明进行详细说明,其中,为叙述方便,现对下文所说的方位规定如下:下文所说的上下左右前后方向与图1本身投影关系的上下左右前后方向一致。结合附图1-4所述的一种汽车外漆修补抛光一体机,包括机身10以及设置于所述机身10底壁内开口向下的转动腔14,所述转动腔14圆周壁内设置有开口向下的环形滑槽11,所述环形滑槽11内可滑动的设置有用于防止油漆扩散的密封罩15,所述密封罩15与所述环形滑槽11顶壁间设置有顶压弹簧12,所述转动腔14内可转动的设置有转动架13。利用计算机视觉模拟人类视觉的功能,从具体的实物进行图象的采集处理、计算、进行实际检测和应用。鞍山全自动汽车面漆检测设备品牌
汽车面漆检测设备
外观缺陷检测简介产品外观缺陷检测属于机器视觉技术的一种,就是利用机器视觉模拟人类视觉的功能,用CCD工业相机代替人眼检测,从具体的实物进行图像的采集处理、计算、终进行实际检测、控制和应用。外观缺陷检测设备的检测原理产品表面的各种缺陷瑕疵,在光学特性上必然与产品本身有差异。当光线入射产品表面后,各种瑕疵缺陷会在反射、折射等方面表现出与周围有不同的异样。例如,当均匀光垂直入射产品表面时,如产品表面没有瑕疵缺陷,出射的方向不会发生改变,所探测到的光也是均匀的;当产品表面含有瑕疵缺陷时,出射的光线就会发生变化,所探测到的图像也要随之改变。由于缺陷的存在,在其周围就发生了应力集中及变形,在图像中也容易观察。若遇到光透射型缺陷(如裂纹、气泡等),光线在该缺陷位置会发生折射,光的强度比周围的要大,因而相机靶面上探测到的光也相应增强;若遇到光吸收型(如砂粒等)杂质,则该缺陷位置的光会变弱,相机靶面上探测到的光比周围的光要弱。分析相机采集到的图像信号的强弱变化、图像特征,便能获取相应的缺陷信息。高精度汽车面漆检测设备生产厂家实现车身A区、B区的漆面全自动检测,检出率高达99%以上。

深度学习算法主要是数据驱动进行特征提取和分类决策,根据大量样本的学习能够得到深层的、数据集特定的特征表示,其对数据集的表达更高效和淮确、所提取的抽象特征魯棒性更強,泛化能力更好,但检测结果受样本集的影响较大。深度学习通过大量的缺陷照片数据样本训练而得到缺陷判别的模型参数,建立出一套缺陷判别模型,终目标是让机器能够像人一样具有分析学习能力能够识別缺陷。深度学习算法基于TensorFlow和Keras框架,常用的深度学习算法有ResNet、MobileNet、MaskR-CNN和FasterR-CNN等。FasterR-CNN是以RPN(注意力网络)和CNN(卷积神经网络)为算法框架,其中RPN用于生成可能存在目标的候选区域(Proposal),CNN用于对候选区域内的目标进行识别并分类,同时进行边界回归调整候选区域边框的大小和位置使其更精淮地标识缺陷目标。FasterR-CNN相比前代的R-CNN和FastR-CNN比较大的改进是将卷积结果共享给RPV和FastR-CNN网络,在提高准确率的同时提高了检测速度。总体来讲,传统图像算法是人工认知驱动的方法,深度学习算法是数据驱动的方法。深度学习算法一直在不断拓展其成用的场景.但传统图像方法因其成熟、稳定等特征仍具有应用价值。目前。
为了提高车身漆面缺陷检测的效率和准确性,本研究利用计算机视觉技术和深度学习方法,以小样本为基础实现了车身漆面缺陷的自动检测。首先,为了实时采集车身油漆缺陷图像,本文提出了一种新的数据增强算法,以增强数据库处理小样本数据过拟合现象的能力。针对汽车涂料固有的缺陷特征,通过改进MobileNet-SSD网络的特征层,优化边界框的匹配策略,提出了一种改进的MobileNet-SSD算法,用于油漆缺陷的自动检测。实验结果表明,改进的MobileNet-SSD算法可以检测出六种传统车身漆膜的缺陷,准确率超过95%,比传统SSD算法快10%,可以实现实时、准确的车身漆面缺陷检测。车身主要由钢制成,长时间暴露在空气中容易被氧化和腐蚀。涂漆后,将在车身表面形成一层保护膜,该保护膜会阻挡空气并使其具有良好的耐腐蚀性。此外,车身漆膜的光滑度在一定程度上影响着人们的购车欲望。同样,如果喷漆不彻底或涂料中含有杂质,会加速汽车的腐蚀,降低消费者的购买意愿。目前,生产线中的大多数人彩绘缺陷都是通过人工目测来检测的。长时间在高度光线下工作并受许多主观因素(例如情绪,视觉疲劳等)影响的工人,将降低缺陷检测的效率并提高检测成本。因此。实现了汽车车身漆膜缺陷的自动检测,有效提高了检测速度和准确性。

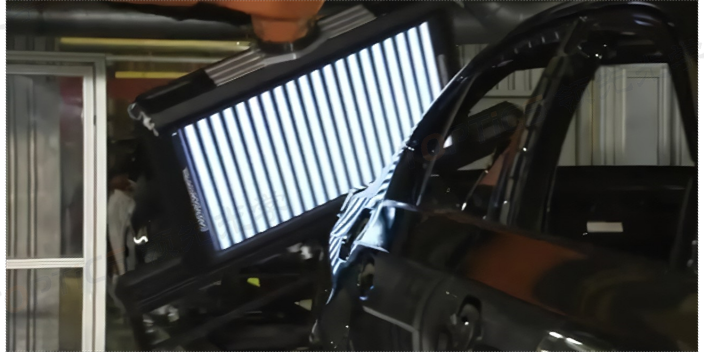
剔除、筛选原则依据两点间距进行,若两点间距小于等于物方视场的一半大小时,则保留为同一幅视场覆盖范围点;若两点间距超出物方视场的一半大小时,则保留为不同幅视场覆盖范围点;通过上述原则得到系列采样点,从而完成对汽车表面轮廓定位检测划分规划。检测时,检测机械手臂带动漆面视觉检测模组至被检测汽车表面的采样点,漆面视觉检测模组中的三个测距传感器分别测量当前漆面视觉检测模组与被检测汽车表面的距离值,通过三个测距传感器获得的三组距离值,根据三组距离值调整检测机械手臂以保证三套成像镜头相机组成像清晰;调整完成后,大尺寸条纹投影屏投影条纹至被检汽车表面,通过n套成像镜头相机组拍摄条纹图像;大尺寸条纹投影屏投影出的条纹包括横、竖90°正交的两组条纹组,其中横条纹组包含不同间距的多条横条纹,竖条纹组包含不同间距的多条竖条纹;n套成像镜头相机组(可拍摄采集到横条纹图像组与竖条纹图像组;条纹图像采集完成后,关闭大尺寸条纹投影屏,打开均匀漫射发光板,利用n套成像镜头相机组拍摄被检测汽车表面图像,得到漫射均匀图像;再通过汽车漆面图像处理提取出被检测汽车表面的外观缺陷。汽车漆面图像处理具体包括以下步骤:步骤。我们的缺陷检测装置不仅可以严格管控产品质量,还能对产品缺陷进行工艺溯源,为工艺品质改善提供数据支持。十堰汽车面漆检测设备供应商家
基于视觉的车身漆膜缺陷自动检测与分类方法,能有效改进传统人工目视检测的不足,提高汽车车身漆膜质量。鞍山全自动汽车面漆检测设备品牌
由此可以建立如下公式进行计算,由此即可形成更加直观且定量的自动检测系统缺陷检出率和单车误报的评价指标。缺陷检出率=检出缺陷/检出缺陷+未检出缺陷×100%;系统单车误报=总误报缺陷个数/总检查车辆数量。为了进一步验证自动检测系统的检测成效,还应建立相应的工作组,由规划、质保和涂装车间进行有效结合,一方面保证每日生产线上有效落实Audit查验车身的方式,另一方面就要在每日生产的过程中,进行一定数量的自动检测系统车身检验,并将自动检测结果与Audit检查结果进行对照,由此获悉检出缺陷、未检测出缺陷和误报缺陷等相关的数据。此外,针对不同车身颜色的情况,还可以建立检出率和单车误报的统计表。自动检测系统在检测过程中受到颜色的影响相对较小,其检出率与单车误报缺陷次数相对稳定,虽然存在个别波动情况,但总体而言并没有出现较大差异,且很大程度上其差异原因在于系统设置的敏感性不同。在出现误报缺陷的情况下,人工查看后确认无缺陷则可以不做返修处理工作。而自动检测系统在批量生产运行过程中,还表现出额外的效果与优势,比如减少了人工劳动力,降低了人力标准,提高了生产的自动化效果等。在传统的报交线上,工人需要负责两方面的工作。鞍山全自动汽车面漆检测设备品牌
领先光学技术(江苏)有限公司成立于2019年,公司总部地址位于武进区天安数码城内独栋12-2#写字楼。我们的种子企业“ling先光学技术(常熟)有限公司”成立于2014年,是国家高新技术企业、科技型中小型企业、江苏省民营科技企业、雏鹰企业。知识产权80余项(发明专利8项)。内核团队:教授2名、博士2名、行业渠道关键人4人。长期稳定与复旦大学、大连理工大学合作。底层技术包括:光学(相位偏折、白光干涉、白光共焦、深度学习);MicroLED(发光器件、透明显示、微型投影)。是做一件“利用光学进行工业质量检测设备的生产和制造”。自主开发光学系统和底层内核算法,拥有十年以上行业经验,主要应用于:汽车玻璃检测行业、片材检测行业、半导体材料检测行业,我们的战略新产品:微米级光刻机已经完成版流片,也正在一步步趋于稳定和成熟。公司在科技的浪潮中,已经具有将内核技术转化为产品的经验与能力。公司是高科技、高成长性企业,公司不断的夯实自身技术基础,愿成为中国工业发展中奠基石的一份子,打破国外的智能装备的,树名族自有高技术品牌。

纳米划痕测试仪:纳米划痕测试仪通过控制金刚石探针在汽车面漆表面进行精确的划痕操作,同时实时测量划痕过程中的摩擦力、划痕深度等参数。设备能够模拟不同程度的刮擦损伤,研究面漆的抗划痕性能与微观失效机制。通过分析划痕后的表面形貌和力学响应,可优化面漆配方和涂层结构,提高漆面的抗刮擦能力,满足消费者对汽车外观耐久性的要求。激光诱导击穿光谱仪:激光诱导击穿光谱仪利用高能量激光脉冲照射汽车面漆表面,瞬间将样品表面的微小区域蒸发并电离形成等离子体。等离子体中元素受激发发射特征光谱,通过光谱分析可快速确定面漆的元素组成与含量。该设备具有非接触、快速检测的特点,适用于现场检测和在线质量监控,可在短时间内对大量面...
- 大同工业质检汽车面漆检测设备供应商 2025-11-20
- 上海光学方法汽车面漆检测设备推荐厂家 2025-11-20
- 包头高精度汽车面漆检测设备推荐厂家 2025-11-20
- 浙江快速汽车面漆检测设备推荐 2025-11-20
- 呼和浩特代替人工汽车面漆检测设备价格 2025-11-20
- 抚顺全自动汽车面漆检测设备推荐 2025-11-20
- 平顶山偏折光学法汽车面漆检测设备哪家好 2025-11-20
- 福州偏折光学法汽车面漆检测设备生产厂家 2025-11-19
- 南昌代替人工汽车面漆检测设备哪家好 2025-11-19
- 马鞍山汽车面漆检测设备供应商 2025-11-19


- 宁德非隧道式汽车面漆检测设备推荐厂家 2025-11-18
- 景德镇全自动汽车面漆检测设备品牌 2025-11-18
- 呼和浩特偏折光学法汽车面漆检测设备供应商家 2025-11-17
- 莆田汽车面漆检测设备源头厂家 2025-11-17
- 呼和浩特光学方法汽车面漆检测设备 2025-11-16
- 宜昌非隧道式汽车面漆检测设备源头厂家 2025-11-14





- 南通曲度玻璃面型检测采购 04-10
- 杭州高铁玻璃面型检测联系方式 04-10
- 南通平坦度玻璃面型检测品牌 04-10
- 镇江翘曲度玻璃面型检测电话 04-10
- 南京大面幅玻璃面型检测电话 04-10
- 杭州大面幅玻璃面型检测价格 04-10
- 上海玻璃面型检测费用 04-10
- 深圳曲度玻璃面型检测费用 04-10
- 苏州在线玻璃面型检测公司 04-10
- 广州大面幅玻璃面型检测品牌 04-10