- 品牌
- 佳控科技
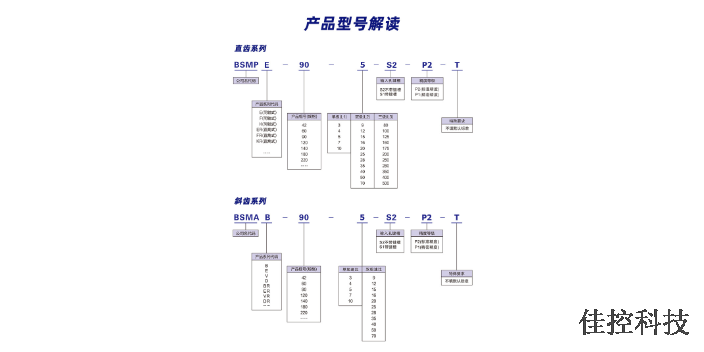
- 型号
- --
- 类型
- 齿轮-蜗杆减速器,蜗杆减速器,摆线减速器,摆线针轮减速器,行星齿轮减速器,圆柱齿轮减速器,无级减速器,谐波减速器
- 载荷状态
- 均匀载荷,强冲击载荷
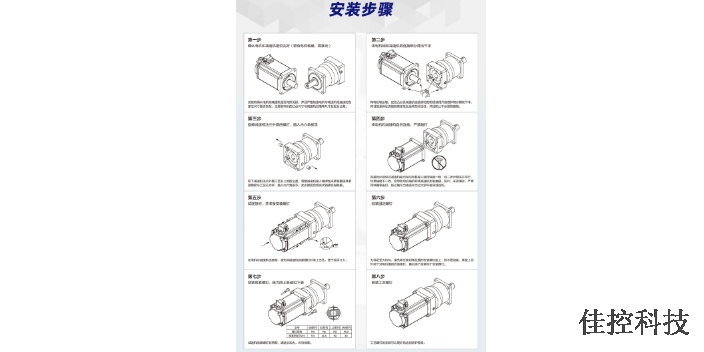
先将差速器轴承调整螺母按相对方向调紧,直到差速器轴承不能转动为止,或在半浮式后桥壳差速器轴承止推面底部加足垫圈,以不让差速器抽承转动为止。然后以0.05-0.08毫米薄厚的垫片逐渐拆垫或松动螺母,使差速器在其位置上转动自如,达到用手拨转一次能转1-2转为好。但必须注意,应以差速器轴承盖或半浮式后桥壳紧固后的轴承间隙为准。如果用调整螺母的方法调整好的轴承间隙,在紧固差速器轴承盖后轴承间隙出现变化,轴承不能转动,这是轴承外套受轴承盖压力的原因!
减速机可以根据需要选择不同的传动比例,以满足不同的工作要求。长宁区减速机厂家供应
精密行星减速机具有出色的承载能力,这主要归因于其独特的结构。多个行星轮均匀分布在太阳轮周围,共同承担负载,使得每个行星轮所承受的载荷相对较小。同时,行星轮与太阳轮、内齿圈之间的啮合方式能够有效地传递和分散扭矩。这种结构设计使得行星减速机在处理大扭矩负载时表现优异。例如,在重型机械的驱动系统中,行星减速机可以承受巨大的扭矩,确保机械的稳定运行。在起重机的起升机构中,行星减速机能够可靠地承载重物的重量,并将电机的动力转化为合适的起升速度和扭矩,保证起吊过程的安全和稳定,满足工业生产中对大负载设备的驱动需求。奉贤区减速机减速机的种类繁多,包括齿轮减速机、行星减速机、蜗轮蜗杆减速机等。

这里包括了两种,一种角传动精度,这是减速机手册里都会标出来的,这影响的是机器人的定位精度;另一种是重复定位精度,这是减速机手册里没有,这影响的是机器人的重复定位精度。角传动精度一般减速机厂家都有专业的设备,但是客户自己也可以设计一些简易的方法去测。重复定位精度也一样。对于新减速机来说,要达到标称的1弧分以下,很多厂家是OK的,但是比较大的问题是一致性和稳定的。可能大部分厂家一开始精度都达标,但几个月后,要么精度跳上跳下,要么直接是越来越差;重复定位精度也如此,短时间内达到较高重复定位精度是没什么问题,但是时间长了,如何保持住就很难了!
行星减速机主要传动结构为:行星轮,太阳轮,外齿圈.行星减速其实就是齿轮减速的原理。行星轮系**主要的特征是它至少具有一个行星轮,行星轮既绕自身轴线自转,又绕另一固定轴线公转,好像行星一样,系围绕太阳在特点轨道运转,称此机构减速机为行星减速机。行星减速机是一种用途***的减速设备,主要保证精密传动的前提下被用来降低转速增大扭矩和降低负载/电机的转动惯量比。行星减速机采用渐开线行星齿轮传动,合理利用内、外啮合、功率分流,箱体采用球墨铸铁,**提高了箱体的钢性及抗震性;齿轮均采用渗碳淬火处理,得到高硬耐磨表面,齿轮热处理后全部磨齿,降低了噪音,提高了整机的效率和使用寿命!减速机是一种用于降低机械设备转速并增加扭矩的装置。

当前,精密行星减速机呈现出集成化的发展趋势。集成化是将减速机与电机、传感器等其他功能部件结合在一起,形成一个更加紧凑、高效的整体。例如,将行星减速机与伺服电机集成,电机的输出轴直接与减速机的输入轴相连,减少了中间连接部件,提高了传动效率和系统的整体精度。同时,还可以集成传感器,如扭矩传感器、角度传感器等,实时监测减速机的运行状态,为控制系统提供反馈信息,实现更精确的控制。这种集成化设计不仅简化了设备的结构,降低了安装和维护成本,而且提高了整个系统的性能和可靠性,在自动化生产线、智能机器人等领域有广阔的应用前景。尽量选用接近理想减速比: 减速比=伺服马达转速/减速机出力轴转速。普陀区减速机供应
通过减速机,我们可以有效地控制机械设备的运行速度。长宁区减速机厂家供应
伺服电机减速机错位是指什么?电机减速机错位即是失步,失步分为丢步和越步。步进电动机正常工作时,每接收一个控制脉冲就移动一个步距角,即前进一步。若连续地输入控制脉冲,电动机就相应地连续转动。丢步时,转子前进的步数小于脉冲数;越步时,转子前进的步数多于脉冲数。一次丢步和越步的步距数等于运行拍数的整数倍。丢步严重时,将使转子停留在一个位置上或围绕一个位置振动,越步严重时,拖动结构将发生过冲。关于步进电机减速机丢步和失步的分析:步进电机减速机选型不当,电机力矩不够或者物体运动的惯量超过电机自锁力,造成的丢步或失步。驱动器选型不当,配套的驱动器电流偏小,影响电机正常运转,现在市面上很多电流虚标的驱动器,拿峰值电流当额定电流来忽悠消费者,驱动器选型额定电流应大于步进电机减速机额定电流的1.2-1.5倍。配套电源选型不当,配套电源应是驱动器额定电源的1.5-2倍,电源虚标比驱动器虚标更严重。控制部分应排除干扰,远离变频器,防静电。长宁区减速机厂家供应
- 江苏减速机现价 2024-12-31
- 普陀区专业减速机哪个好 2024-12-31
- 静安区涡轮蜗杆减速机品牌 2024-12-31
- 嘉定区精密型减速机供应 2024-12-31
- 宝山区转角高精密减速机 2024-12-31
- 虹口区高精密减速机产品介绍 2024-12-31
- 江苏现代化减速机哪里好 2024-12-23
- 宝山区精密型减速机现价 2024-12-23
- 金山区现代化减速机 2024-12-23
- 宝山区高精密减速机 2024-12-23
- 黄浦区精密减速机哪里好 2024-12-23
- 浙江现代化减速机厂家供应 2024-12-22