增强设备自感知能力:增加设备内部的监测点和传感器种类,实现对设备更多运行状态参数的实时监测。例如,在关键部件上安装温度传感器、振动传感器等,获取更多与故障相关的信息,为故障诊断提供更丰富的数据来源。提高设备通信可靠性:采用可靠的通信协议和通信方式,确保设备之间的数据传输准确无误。增加通信...
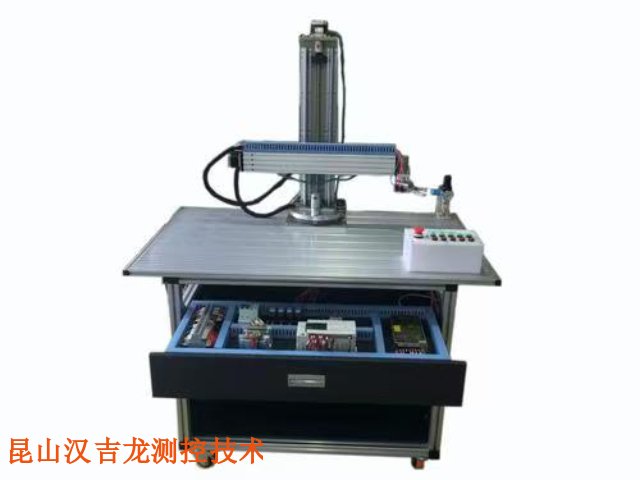
运动控制实训平台基本参数
- 品牌
- HOJOLO,LEAKSHOOTER,VALENIAN,VA
- 型号
- VT-ZP160
- 类型
- 操控实训台
- 加工定制
- 是
- 用途
- 教学实训
- 电机功率
- 10
- 外形尺寸
- 1900x1000x1200
- 重量
- 10
- 产地
- 昆山
- 厂家
- 汉吉龙测控技术有限公司
运动控制实训平台企业商机
加强理论学习研读相关资料:认真阅读运动操控实训平台的操作手册、技术文档,了解平台的系统架构、工作原理、各模块功能及性能指标等基础知识。同时,学习运动操控相关的知识,包括电机原理、传感器原理、操控算法、PLC编程等,为实际操作奠定理论基础。参加课程:可以通过在线课程平台或线下培训机构,参加运动操控相关的课程。系统学习运动操控的理论知识和实践技能,有教师的指导和讲解,能更深入地理解和掌握相关知识,也可与其他学员交流学习心得和经验。查阅学术文献:在学习过程中遇到难点问题或想深入了解某些技术细节时,可查阅相关的学术文献、研究报告,了解运动操控领域的***研究成果和技术应用,拓宽知识面和视野。 运动实训平台的操作手册是否涵盖了所有可能遇到的问题及解决方法?实物运动控制实训平台制造商

要进一步提高运动操控设备自我诊断功能检测通信故障的准确性,可以从完善检测技术、优化通信系统、提升数据分析能力和强化管理措施等方面入手,以下是详细介绍:完善检测技术多维度监测:增加对通信过程中更多参数的监测,除了传统的信号强度、误码率等指标,还可监测信号的相位、频率稳定性、通信延迟等。通过多维度的数据采集,更***地了解通信状态,提高故障判断的准确性。例如,在无线通信中,监测信号的相位变化可以帮助发现因信号干扰导致的相位失真问题,从而及时识别通信故障。采用算法:引入人工智能和机器学习算法,如神经网络、支持向量机等,对采集到的通信数据进行分析和处理。这些算法可以学习正常通信和故障通信的模式,从而更准确地识别各种通信故障。通过对大量历史通信数据的学习,神经网络可以迅速判断当前通信状态是否正常,并准确指出故障类型。实时监测与动态调整:提高自我诊断功能的监测频率,实现实时监测通信状态。同时,根据设备的运行情况和环境变化,动态调整监测参数和诊断策略。在通信环境复杂或设备负载变化较大时,自动增加监测频率和分析的细致程度,以便及时发现潜在的通信故障。优化通信系统冗余设计:采用通信冗余技术。 HOJOLO运动控制实训平台使用方法平台的软件系统更新是否会影响正常教学进度?

HOJOLO运动操控设备的自我诊断功能对常见故障的诊断准确率受多种因素影响,很难给出一个确切的具体数值,一般来说在较为理想的情况下可以达到70%-90%左右,但在复杂环境或特殊情况下可能会大幅降低,以下是具体分析:受设备技术水平影响**设备:一些采用了传感器技术、具备强大数据处理能力和智能诊断算法的**运动操控设备,对于常见故障的诊断准确率相对较高。例如,配备了高精度电流、电压传感器,能够实时精确采集设备运行参数,再结合深度学习算法进行故障诊断的设备,对于电机过载、过流等常见电气故障,诊断准确率可能高达85%-90%。普通基础设备:技术水平相对较低、诊断功能较为简单的运动操控设备,诊断准确率会相对较低。这类设备可能*依靠简单的阈值判断和有限的故障代码来诊断故障,对于一些复杂的常见故障,容易出现误判或漏判的情况,整体诊断准确率可能在70%-80%左右。
运动操控设备的自我诊断功能通常是可以定期自动执行的,以下从实现方式、相关设置及优势等方面为你具体介绍:实现方式基于定时器机制:运动操控设备内部一般设有定时器,可设定特定的时间间隔,到达设定时间后,定时器会触发自我诊断程序开始运行。比如以每隔1小时、2小时等为周期,自动启动诊断流程,对设备的关键部件和功能进行检查。与系统时钟同步:设备可以与系统时钟进行同步,按照预先设定的时间点或时间周期来执行自我诊断。例如,可设置在每天凌晨2点等业务低谷时段进行***的自我诊断,既不影响设备正常使用,又能及时发现潜在问题。相关设置可配置诊断周期:用户或维护人员通常可以通过设备的操作界面、上位机软件或编程接口等,根据实际需求灵活配置自我诊断的周期。对于使用频繁、对稳定性要求高的设备,可以设置较短的诊断周期;对于一些相对稳定、使用频率较低的设备,则可以适当延长诊断周期。多级诊断模式:有些运动操控设备支持多级诊断模式,在不同的时间尺度上执行不同级别的诊断。例如,每隔一定短时间(如10分钟)进行一次迅速的基本状态检查,包括检查关键参数是否在正常范围、通信是否正常等;每隔较长时间(如每天)进行一次***深入的诊断。 运动实训平台的设备运行噪音是否在可接受范围内?

生产线以结合当地持色,以86式插座会实训对象,方案设计主要分为16个单元组成,双腕机器人86式插口装配单元、工业机器人上下料工作站、双腕机器人通电检测单元、工业机器人面板安装单元、工业机器人底盒打螺丝单元、工业机器人面板总装下科单元、物流输送线单元、立体仓库单元、RFID系统、手机下单系统、智能MES系统、AGV系统、总控系统、供气系统、工业物联网系统、电源管理系统等组成。
整机技术参数:1、工作电源:三相五线380V±5%50HZ2、安全保护:漏电保护,过流保护,短路保护3、额定功耗:≤35KW4、机器人品牌:库卡5、PLC控制系统:西门子1200/15006、触摸屏:威纶通7、低压电器:施耐德/欧姆龙8、设备尺寸:20000x4000mm 运动实训平台的操作流程是否有优化的空间?实物运动控制实训平台制造商
运动实训平台能同时满足多少学生进行实操训练?实物运动控制实训平台制造商
本系统设计主要为十六大工作站,主要由工业机器人装配工作站、工业机器人激光焊接工作站、工业机器人激光切割工作站、工业机器人搬运工作站、工业机器人打磨抛光工作站、工业机器人激光打标下料工作站、倍速链输送系统、立体仓库系统、AGV系统、手机下单系统、MES系统、工业物联网系统、RFID系统、电气总控系统、供气系统、智能工厂虚拟仿真系统等组成。展示了自动化、数字化、网络化、集成化、信息化、智能化的功能和思想。涉及智能控制技术、工业机器人技术、机电一体化技术、工业工程技术、计算机应用技术、软件技术、自动化技术等领域的知识和技能。采用离散型制造的典型模式---金属加工领域“智能制造”单元,结合工业机器人、激光技术、MES系统、智能传感与控制系统、智能制造信息化系统等智能制造关键技术装备、软件系统进行设计。Kunshan hojolo technologies co., LTD实物运动控制实训平台制造商
与运动控制实训平台相关的文章

产线运动控制实训平台怎么样
- 实物运动控制实训平台怎么样 2025-03-01
- 皮带输送运动控制实训平台厂家 2025-02-28
- 送料设备运动控制实训平台生产 2025-02-28
- 智能制造运动控制实训平台视频 2025-02-27
- 6轴运动控制实训平台原理 2025-02-27
- 材料仓库运动控制实训平台厂家排名 2025-02-26
- 高校运动控制实训平台现状 2025-02-26
- 上料运动控制实训平台怎么用 2025-02-26
- 运动控制实训平台装置 2025-02-25
- 维修运动控制实训平台怎么用 2025-02-24
- VALENIAN运动控制实训平台实验 2025-02-24
- 上料运动控制实训平台设备 2025-02-22
与运动控制实训平台相关的产品

与运动控制实训平台相关的新闻
-
山西运动控制实训平台 2025-02-20 01:06:17电气操控电路的安装和PLC编程操控程序编写LC?伺服电机驱动器的二轴控程序编写4.基于PLC的步进电机二轴与伺服电机主轴对位操控程序编写5.基于伺服***位置系统的主轴对位操控程序编写6.基于触摸屏操控二轴高速同步运转程序编写任务五:系统调试与运行三、技术性能1.输入电源:单相三线~220V...
-
HOJOLO运动控制实训平台公司 2025-02-20 11:05:58运动实训平台的运动操控设备通常具备一定的自我诊断功能,但自我修复功能相对有限,以下是具体分析:自我诊断功能常见诊断内容硬件故障诊断:运动操控设备一般能对自身的硬件组件进行检测,例如电机、驱动器、传感器等。通过监测电流、电压、温度等参数,判断硬件是否存在过热、短路、过载等问题。如驱动器可以...
-
送料设备运动控制实训平台产线 2025-02-20 17:05:54质量的运动操控实训平台课程体系会力求***覆盖运动操控**知识,但具体情况可能因平台设计目标、适用对象、课程设置等因素而有所不同。以下从通常包含的内容和可能存在的不足两方面来分析:通常涵盖的**知识理论基础电机原理:详细讲解直流电机、交流电机(如异步电机、同步电机)等常见电机的工作原理、...
-
实物运动控制实训平台制造商 2025-02-18 12:06:50加强理论学习研读相关资料:认真阅读运动操控实训平台的操作手册、技术文档,了解平台的系统架构、工作原理、各模块功能及性能指标等基础知识。同时,学习运动操控相关的知识,包括电机原理、传感器原理、操控算法、PLC编程等,为实际操作奠定理论基础。参加课程:可以通过在线课程平台或线下培训机构,参加...
与运动控制实训平台相关的问题
新闻资讯
产品推荐
-
昆山轴对中激光仪图片
2026-02-26 -

设备无线激光对中仪使用方法
2026-02-26 -
原装进口对中仪图片
2026-02-26 -

三合一便携同心度检测仪企业
2026-02-26 -

国内激光对中服务图片
2026-02-26 -

汉吉龙测控无线激光对中仪批发
2026-02-26 -

机械无线激光对中仪用途
2026-02-26 -
傻瓜式对中仪定制
2026-02-26 -

瑞典激光联轴器对中仪演示
2026-02-26