自动化智能机器人实验台的能耗大小取决于多种因素,以下是具体分析:硬件配置方面电机功率:实验台若配备大功率的电机来驱动机器人的运动,如一些用于工业模拟的重型机器人实验台,其电机可能需要几十千瓦的功率来实现高精度、高负载的运动,能耗相对较大。而小型的教育类机器人实验台,电机功率可能*为几瓦到几十...
自动化智能机器人实验台基本参数
- 品牌
- VALENIAN/瓦伦尼安
- 型号
- VT-ZP500
- 类型
- 自动化实训台
- 加工定制
- 是
- 用途
- 教学实训
- 电机功率
- 2
- 外形尺寸
- 1200X1000X1500
- 重量
- 10
- 产地
- 苏州
- 厂家
- 昆山汉吉龙测控技术有限公司
自动化智能机器人实验台企业商机
决策与操控方面自主决策能力:面对复杂多样的实验任务和动态变化的实验环境,机器人需具备自主决策能力,如根据实验进展选择合适操作流程、应对突等。但当前人工智能模型在处理复杂任务决策时,存在依赖大量数据和计算资源、决策过程难以解释等问题,限制了机器人在实验场景中的自主决策能力1。运动操控精度与稳定性:实验台的机器人通常要完成高精度的操作任务,如微量液体的吸取和滴加、微小零件的装配等,这要求运动操控达到亚毫米甚至微米级精度。同时,在高速运动或长时间运行时,还需保证系统的稳定性和可靠性,防止出现振动、误差累积等问题。多机器人协同操控:一些实验可能需要多个机器人协同工作,如共同完成大型实验装置的操作或进行多步骤实验。此时,如何实现多机器人之间的精确同步、任务分配和协调配合,避免相互干扰和碰撞,是一个复杂的技术挑战。 自动化为实验台带来机遇了吗?皮带输送自动化智能机器人实验台写论文
功能与性能问题功能不匹配:软件的功能与实验台的实际需求不匹配,无法充分发挥实验台的性能。例如,软件没有提供实验台所需的特定运动操控功能,或者软件的操控逻辑与实验台的硬件结构不匹配,导致机器人无法完成预期任务。性能瓶颈:软件的算法复杂度较高,而实验台的硬件性能有限,会导致软件运行缓慢,影响机器人的实时操控和响应速度。比如在进行复杂的路径规划算法计算时,实验台的处理器性能不足,使得机器人的路径规划时间过长,无法满足实时应用的要求。实时性要求***:有些软件需要实时获取实验台的数据并进行处理,而实验台可能无法满足如此高的实时性要求。例如,在机器人的高速运动操控中,软件需要以极高的频率获取传感器数据来调整运动姿态,但实验台的数据采集和传输速度有限,无法满足软件的实时性需求,导致机器人运动操控精度下降。气动系统自动化智能机器人实验台制造商自动化智能机器人实验台很好。

运动操控算法可通过以下多种方式提高自动化智能机器人实验台的操作精度:误差补偿与校正方面PID操控算法:比例(P)环节能迅速根据当前误差调整操控量,使机器人迅速向目标位置靠近;积分(I)环节可累积过去的误差,稳态误差,确保机器人**终能精确到达目标位置,而不会存在残留偏差;微分(D)环节能根据误差的变化趋势提前进行调整,预测并防止机器人出现超调或振荡,让机器人的运动更加平稳、精确。自适应操控算法:可实时监测机器人的运动状态和系统参数变化,自动调整操控参数以适应这些变化。比如当实验台的负载发生变化或者机械部件出现磨损时,自适应操控算法能及时调整操控增益等参数,补偿因这些因素导致的运动误差,保持操作精度。迭代学习操控算法:在重复执行相同任务的过程中,该算法能不断学习和记忆上一次操作的误差信息,并根据这些信息调整本次的操控策略,逐渐减小误差,使机器人在每次迭代中都能更精确地完成任务,适用于有重复性操作要求的实验台任务。
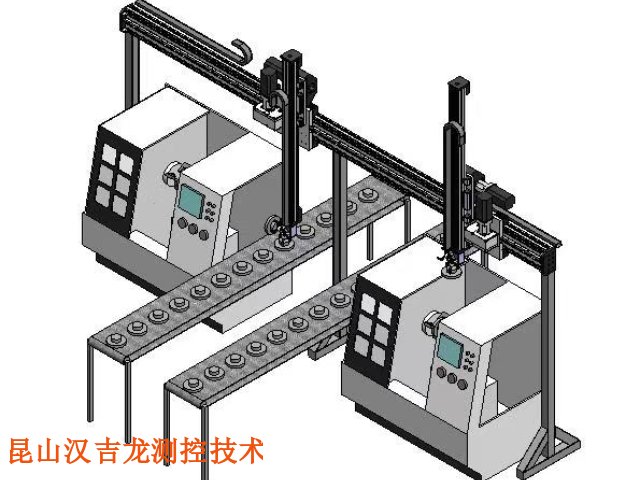
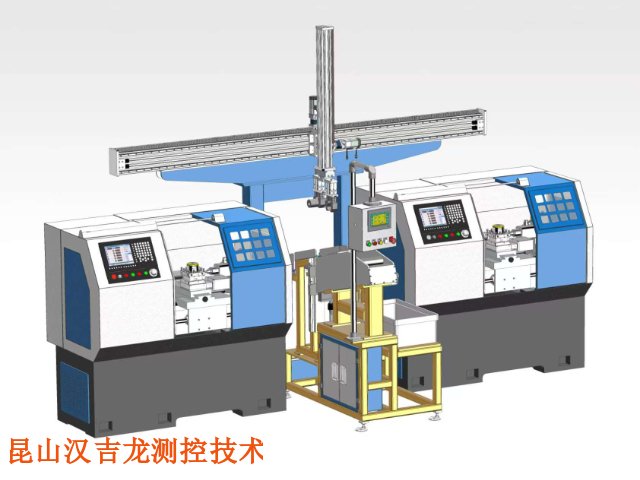
常见类型工业机器人实验台:主要模拟工业生产中的机器人应用场景,如焊接、装配、搬运等,通常具有较高的负载能力和精度,可用于研究工业机器人的控制策略和优化生产流程。服务机器人实验台:侧重于机器人在服务领域的应用,如家庭服务、酒店服务、导览服务等,注重人机交互、环境感知和自主导航等功能的研究和开发。医疗机器人实验台:针对医疗领域的需求设计,用于研究和开发手术机器人、康复机器人、护理机器人等,需要具备高精度的操作和与人体的安全交互功能。智能移动机器人实验台:以移动机器人为**,研究机器人的自主导航、路径规划、环境感知等技术,可应用于物流运输、安防监控、农业植保等领域。分析自动化智能机器人实验台的数据十分关键。

自动化智能机器人实验台是一种集成了多种技术,用于开展机器人相关实验和研究的设备平台,以下是其相关介绍:功能特点多任务操作功能:可进行如样品处理、搬运、装配等多种操作任务。例如在一些生命科学实验室的自动化智能机器人实验台中,机器人能够自动完成样品的分拣、移液、混合等操作123。高精度运动操控:借助高精度的电机、减速器和操控系统,实现精确的位置操控和轨迹,确保机器人在操作过程中的准确性和稳定性。比如在机械加工实验中,能精确操控机械臂完成高精度的零件加工任务。传感器集成与感知:配备多种传感器,如视觉传感器、力传感器、触觉传感器等,使其能够感知周围环境信息。如在物流仓储实验中,通过视觉传感器识别货物的形状、位置和颜色等,实现准确的货物分拣和搬运。智能操控与编程:通常采用智能操控系统,支持多种编程方式,如图形化编程、代码编程等,方便用户根据实验需求对机器人进行编程和操控。还能结合人工智能算法,实现自主学习、路径规划、任务优化等智能功能。数据采集与分析:可以实时采集机器人运行过程中的各种数据,如位置、速度、力等,并进行数据分析和处理,为实验研究提供数据支持。比如在机器人性能测试实验中。实验台能推动机器人技术成熟吗?重载自动化智能机器人实验台产线
企业引进自动化智能机器人实验台提升竞争力。皮带输送自动化智能机器人实验台写论文
多传感器融合与反馈方面基于视觉反馈的操控算法:利用视觉传感器获取机器人当前的位置、姿态以及周围环境信息,与目标状态进行对比,然后根据偏差调整机器人的运动。视觉反馈能提供丰富的环境信息,使机器人能够实时感知并避开障碍物,精确地对准目标,常用于需要高精度操作的实验场景。多传感器融合操控算法:将多种传感器(如视觉、力觉、惯性传感器等)的数据进行融合处理,综合利用各传感器的优势,为运动操控算法提供更***、准确的信息。例如,力觉传感器可用于精确操控机器人与物体的接触力,在进行装配、抓取等操作时,结合视觉和力觉反馈的操控算法能使机器人更精确地完成任务,提高操作的准确性和成功率。迭代学习操控算法的原理是什么?基于样条曲线的轨迹规划算法有哪些?除了文中提到的算法。皮带输送自动化智能机器人实验台写论文
与自动化智能机器人实验台相关的文章
送料设备自动化智能机器人实验台内容
- 电机自动化智能机器人实验台调试 2025-03-02
- 气动系统自动化智能机器人实验台课程 2025-03-01
- 产线自动化智能机器人实验台生产 2025-03-01
- 设备自动化智能机器人实验台产线 2025-03-01
- 江苏自动化智能机器人实验台课程 2025-02-28
- 人机界面自动化智能机器人实验台电话 2025-02-28
- 气动系统自动化智能机器人实验台装置 2025-02-28
- 自动化自动化智能机器人实验台图片 2025-02-28
- 自动化自动化智能机器人实验台定制 2025-02-27
- 气动系统自动化智能机器人实验台原理 2025-02-26
- 多功能自动化智能机器人实验台使用方法 2025-02-26
- 自动化装置自动化智能机器人实验台使用方法 2025-02-26
与自动化智能机器人实验台相关的产品


与自动化智能机器人实验台相关的新闻
-
维修自动化智能机器人实验台调试 2025-02-22 02:06:08自动化智能机器人实验台可使用的数据分析算法种类繁多,以下是一些常见的算法:数据预处理算法归一化算法:该算法将数据映射到特定的区间,如将数据归一化到[0,1]或[-1,1]区间,不同特征之间在量纲和取值范围上的差异,使数据具有可比性,提升后续算法的准确性和稳定性。例如,机器人的传感器数据中,距...
-
气动系统自动化智能机器人实验台企业 2025-02-22 00:17:55VALENIAN自动化智能机器人实验台影响服务质量的因素品牌与厂家实力:**品牌和实力较强的厂家通常会有更完善的售后服务体系。如ABB、欧姆龙等大品牌,在全球或范围内设有多个服务点,有的售后服务团队和充足的资源支持4。地域因素:如果用户所在地区有厂家的服务网点或授权维修中心,那么在获取售后服...
-
重载自动化智能机器人实验台特点 2025-02-22 08:06:16VALENIAN自动化智能机器人实验台数据处理与通信方面海量数据处理:实验过程中,机器人和各种传感器会产生大量数据,如高分辨率图像、实时监测数据等。对这些海量数据进行迅速采集、存储、分析和挖掘,从中提取有价值的信息,以支持实验决策和优化,需要强大的数据处理能力和数据处理算法2。实时通信可...
-
皮带输送自动化智能机器人实验台写论文 2025-02-22 19:06:15决策与操控方面自主决策能力:面对复杂多样的实验任务和动态变化的实验环境,机器人需具备自主决策能力,如根据实验进展选择合适操作流程、应对突等。但当前人工智能模型在处理复杂任务决策时,存在依赖大量数据和计算资源、决策过程难以解释等问题,限制了机器人在实验场景中的自主决策能力1。运动操控精度与...
与自动化智能机器人实验台相关的问题
新闻资讯
产品推荐
-
振动联轴器对中服务装置
2026-02-24 -
工业法兰联轴器对中仪调试
2026-02-24 -

红外对中仪服务多少钱
2026-02-24 -

设备对中仪保修
2026-02-24 -
进口激光联轴器对中仪视频
2026-02-24 -

基础款联轴器不对中测量仪制造商
2026-02-24 -

专业无线激光对中仪激光
2026-02-24 -

S和M对中仪连接
2026-02-24 -
10米联轴器振动红外对中仪校准规范
2026-02-24