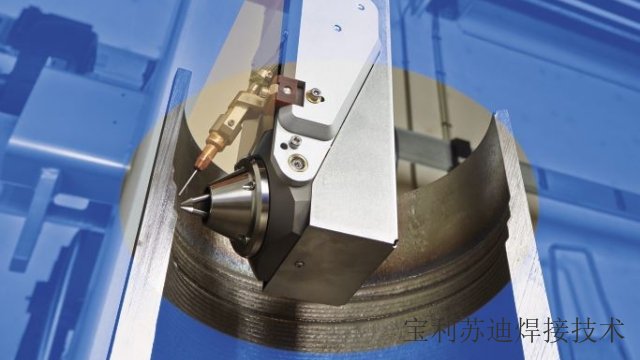
宝利苏迪无限回转堆焊机头SPX的2个滑块分别同时具备AVC和摆动功能。AVC滑块内壁堆焊时用于弧长跟踪,同时用于调整焊接直径。在非焊接时可实现焊枪位置在水平方向上的精细调整,焊接时,通过事先编程预设的电弧电压来精确控制电弧长度,使焊接电弧趋向稳定,保持良好的熔池形态,即实现焊缝高度方向的跟踪。焊接时也可以通过AVC滑块对电弧电压进行微量调整,以改变电弧长度。垂直方向滑块内壁堆焊时可作为堆焊行走轴,用于自动布道。在非焊接时可实现焊枪位置在焊缝垂直方向的精细调整。预先编程设置摆动参数后,可在焊接过程中实现焊枪自动摆动,焊接时也可以通过摆动滑块对焊枪的垂直焊缝方向位置进行微量调整。自动氩弧堆焊、自动TIG堆焊可应用于维修损坏部件,防磨防腐蚀层生产,增加隔离层作用。吉林自动弯管堆焊机头

AVC滑块、OSC滑块具有特殊的重要性,因为它们直接干预焊接过程控制。AVC装置由动力滑块、测量系统和闭环调节系统组成。系统需要检测焊炬(靠近钨极处)的电弧电压,以限制线束长度产生的线路损耗影响。AVC的工作原理是基于电弧高度和产生的电压值之间的直接关系(特定电流值情况下)。在正常工作范围内(氩气保护下焊接,电流30A以上),AVC克服了所有的不规则性,确保电弧特性的恒定,从而增强了焊珠的规律性。各种相关功能有助于更精细地控制AVC滑块的反应,使其更具反应性,抑制其运动或延迟对焊缝池的影响。此外,AVC滑块的运动在焊接程序中进行编程,并与焊接电流同步。山西管件堆焊机器人宝利苏迪自动堆焊设备可用于蒸汽发生器及余排管板的耐腐蚀堆焊。
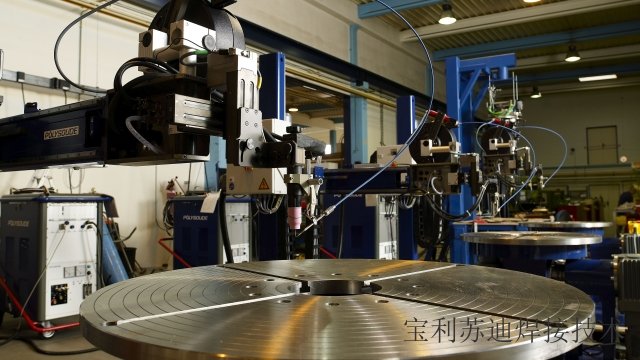
对于内壁堆焊,内孔堆焊,小孔内壁堆焊,小管内壁堆焊来说,如果焊接机头的旋转中心和工件的中心不同心,将会对焊接速度造成影响。宝利苏迪POLYSOUDE自动定心功能,可自动实现焊接机头旋转中心与管件中心同心,动作均由焊接电源程序控制,自动执行,非常方便。焊接电源可计算机头中心相对工件内壁中心的偏心距,然后给横臂伸缩和操作机的水平滑块发送指令,滑块和操作机横臂按照指令进行动作,移动相应距离,从而使机头旋转中心和焊接工件中心一致,完成自动对中。
宝利苏迪POLYSOUDE自动堆焊机头安装于堆焊机器人端部法兰,由堆焊焊枪,送丝机构,焊枪水气接口板,线束组成。焊枪满足电流容量大,并具有热丝功能。钨极与焊丝之间距离可调。堆焊母材:碳钢或合金钢。填充焊丝:不锈钢焊丝或镍基合金焊丝,低合金焊丝。焊丝直径:1.0mm,1.2mm。钨极尺寸:4.0mm。焊接机头上配有角度调节板,可在0-45度范围内将焊枪从横焊调整至斜向下45度,便于堆焊接管内台阶处的角焊缝。焊接机头具有送丝机构,包括送丝点击,焊丝盘支架,送丝导管,热丝导电杆,导丝嘴等。送丝机构的送丝嘴具有合适的角度,保证焊丝能够顺畅地送入熔池中,送丝顺畅有力,速度无极可调。宝利苏迪机器人堆焊设备,可采用编程控制或根据待焊工件形状自主规划焊接路径,实现回转,直道及摆动焊接。
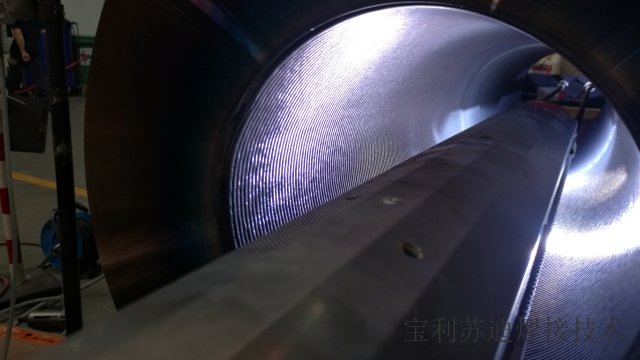
POLYSOUDE宝利苏迪自动堆焊设备,自动氩弧堆焊设备可用于长管内壁、内孔防腐材料复合层的纵缝堆焊拼接。工件由滚轮架支撑并调整位置,焊枪由穿过管内并拉紧的钢丝绳导向,由机头行走机构推拉进出管子完成纵缝焊接。设备由焊接电源、焊接机头、机头行走及导向机构、钢丝绳拉紧机构、滚轮支撑架、电气控制系统和水冷系统等部分组成。宝利苏迪长管内壁、内孔纵缝堆焊设备可以支撑单钨极焊枪、双钨极焊枪的切换,满足不同工艺的使用需求。宝利苏迪双金属复合管TIG内壁纵缝堆焊拼接设备配备有两种焊接机头,单钨极单丝,双钨极单丝,并由同一个焊接系统控制。宝利苏迪自动堆焊设备具备断弧,更换钨极等中断操作后的记忆功能,可在中断处继续起弧焊接。江苏自动弯头堆焊系统
宝利苏迪长管纵缝堆焊设备,焊枪由钢丝绳导向,由机头行走机构推拉进出管子完成纵缝焊接。吉林自动弯管堆焊机头
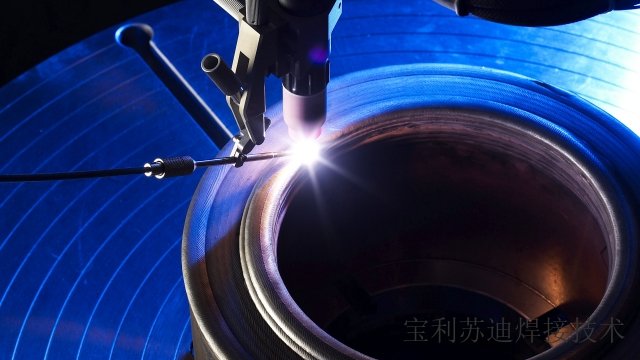
宝利苏迪POLYSOUDE自动堆焊设备,内孔堆焊设备摄像监控系统包括:水冷焊接摄像头,视频监视器,单独的控制系统,信号放大器及电缆束等。该系统可以用与焊前焊枪的辅助定位,焊接时焊接状态监控,可实现远程控制功能,尤其适用于空间位置受限,不便于直接观察的焊接位置,可同时清晰拍摄电弧形态、焊缝熔池界面、焊丝送进情况和焊缝成形。焊接时操作人员可根据视频监控系统人工通过遥控器远程调节焊枪相对坡口的位置。根据多年内孔堆焊应用经验,在焊枪整合高清摄像头是非常有必要的。焊接摄像头能起到帮助焊工判断在焊接过程中判断填充金属的熔敷效果,侧壁的熔合效果的作用。吉林自动弯管堆焊机头