AGV移动机器人具有的优势:1、自动化和提高效率:AGV是自动引导的,能够自主执行任务,无需人为干预。这使它们能够在生产线、仓库等环境中高效地执行物流和搬运任务,提高整体工作效率。2、灵活性和可编程性:AGV具有灵活的设计,可以根据需要进行编程和重新配置。这使它们适用于不同的工作场景和任务,并能够适应生产流程的变化。3、安全性:AGV通常配备先进的传感器和导航技术,使它们能够避免障碍物、识别环境,并执行安全的操作。这降低了事故风险,特别是在繁忙的生产环境中。食品饮料行业,卫生级 AGV 机器人保障食品搬运过程安全卫生。东莞巡检机器人工作原理

AGV移动机器人是一种自动化导航机器人,由计算机控制,具有移动、自动导航、多传感器控制、网络交互等功能。它可以通过预设的路径和任务,自主地进行运行和导航,实现自动化运输和作业。AGV移动机器人通常配备有搬运、推拉、夹持等装置,可以完成物料搬运、装配、检测等任务,也可以用于自动化生产线上的物料搬运、装配、检测等环节。AGV移动机器人技术发展经历了多个阶段。较早的AGV诞生于1953年的美国,由一辆简易的AGC(Automated Guided Cart)产品牵引式拖拉机改造而成。移动机器人现货直发带升降功能的 AGV 机器人,可适应不同高度的货物装卸作业。
AGV的工作原理:AGV的工作原理主要依赖于先进的导航技术和自动化控制系统。常见的导航方式包括磁条引导、激光引导、RFID(无线射频识别)引导等。在磁条引导方式中,AGV通过识别地面铺设的磁条来确定行驶路径;激光引导则利用激光反射器和传感器来构建环境地图,实现自主导航;RFID引导则是通过读取地面或货物上的RFID标签来获取信息,进行定位和导航。同时,AGV还配备了多种传感器,如避障传感器、超声波传感器等,以确保行驶过程中的安全性和稳定性。
AGV移动机器人的技术发展主要体现在以下几个方面:1.导航技术:AGV的导航技术是实现自动化运输的关键,经历了从磁导航、惯性导航到激光导航、视觉导航等技术的发展历程。目前,激光导航和视觉导航已经成为主流技术,能够实现高精度、高稳定性的导航。2.传感器技术:随着传感器技术的发展,AGV机器人配备了多种传感器,如激光雷达、红外传感器、超声波传感器等,用于实现环境感知和定位定向功能,提高AGV的感知能力和适应性。不同类型的AGV在功能和应用场景上各有侧重,满足了不同行业的多样化需求。教育领域,AGV 机器人可用于教学演示,展示自动化技术原理。

从市场趋势来看,AGV移动机器人市场将继续保持快速增长的态势。一方面,随着智能制造和工业自动化的不断深入,企业对自动化物料搬运、装配、检测等环节的需求将不断增加,为AGV机器人市场提供了广阔的发展空间。另一方面,随着技术的不断进步和应用需求的增加,AGV机器人的性能和应用场景也将不断拓展和完善,为企业带来更多的便利和效益。当涉及到AGV(自动引导车)移动机器人的应用领域时,它们在各种行业和环境中发挥着重要作用。随着技术发展,AGV 机器人的导航精度和稳定性不断提升。东莞巡检机器人工作原理
自动导引车(AGV)能24小时不间断工作,提高生产效率。东莞巡检机器人工作原理
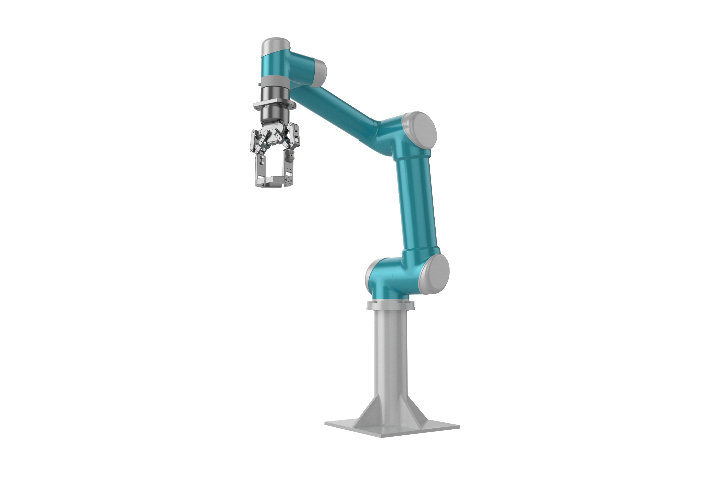
工业机器人的特点:自20世纪60年代初头一代机器人在美国问世以来,工业机器人的开发和应用发展迅速,但工业机器人较明显的特点如下。1.可编程。生产自动化的进一步发展是柔性自动化。工业机器人可以随着工作环境的变化而重新编程,因此它可以在小批量、多品种、平衡、高效的柔性制造过程中发挥良好的作用,是柔性制造系统(FMS)的重要组成部分。2.拟人化。工业机器人在机械结构上有类似的行走、腰部旋转、前臂、前臂、手腕、爪子等部分,并且在控制方面有计算机。此外,智能工业机器人还有许多类似于人类的生物传感器,如皮肤接触传感器、力传感器、负载传感器、视觉传感器、声觉传感器、语言功能等。传感器提高了工业机器人对周围环境的自适应性。东莞巡检机器人工作原理