激光雷达定标板作为激光雷达系统校准的重心组件,其重心功能是为激光雷达提供稳定、已知的反射率参考,确保雷达在长期使用过程中保持测量精度。在激光雷达的工作原理中,雷达发射的激光束遇到目标物体后会发生反射,接收端通过检测反射光的强度、时间等信息计算目标的距离、轮廓等参数。而激光雷达定标板正是通过精细控制自...
激光雷达定标板基本参数
- 品牌
- 广州瑞科光电
- 型号
- 齐全
- 类型
- 激光雷达定标板
- 规格
- 波长:200-2500nm;反射率:1%-99%
- 加工定制
- 是
- 厂家
- 广州瑞科光电科技有限公司
- 产地
- 广州
激光雷达定标板企业商机
激光雷达定标板在自动驾驶领域的应用为广且关键,直接关系到自动驾驶汽车的安全行驶。自动驾驶汽车的激光雷达需要实时、准确地检测周围环境中的车辆、行人、障碍物等目标,而长期行驶过程中,激光雷达可能会因振动、温度变化、灰尘覆盖等因素导致测量精度下降。因此,自动驾驶汽车在生产下线前,需要通过激光雷达定标板进行出厂校准,确保雷达的各项参数符合设计要求;在日常使用过程中,也需要定期(如每半年或每万公里)到专业的维修站点进行校准维护,使用定标板对雷达的反射率检测精度、距离测量精度等进行重新修正。此外,部分自动驾驶企业还会在测试场地中设置固定的定标板装置,用于实时监测激光雷达在不同行驶场景下的性能变化,为算法优化提供数据支持。提升三维建模准确度,瑞科光电定标板让激光雷达数据更准确可信。10%反射率激光测距板销售

激光雷达定标需多种工具协同,定标板常与激光干涉仪、标准距离尺、环境监测仪配合,实现全维度精度校准。与激光干涉仪协同:先用激光干涉仪测量激光雷达的激光波长(波长误差≤0.1nm),再用定标板进行距离定标,避免因波长漂移(温度每变化 1℃,波长漂移约 0.05nm)导致距离定标误差,两者结合可使距离测量误差从 ±3cm 降至 ±1.5cm;与标准距离尺协同:标准距离尺(精度 ±0.1mm)用于校准定标板与激光雷达的实际距离,替代全站仪,适合实验室近距离定标(1-5m),减少距离测量误差对定标板校准的影响;与环境监测仪协同:环境监测仪实时监测温湿度(精度 ±0.5℃、±2% RH)、大气颗粒物浓度,定标时根据监测数据修正环境影响,如湿度 60% RH 时,反射率修正 + 0.3%,颗粒物浓度超 100μg/m³ 时,增加清洁频率,确保定标数据不受环境干扰。协同使用需遵循 “先工具校准、后定标板定标” 的顺序:先校准激光干涉仪、标准距离尺,再用校准后的工具辅助定标板定标,形成完整的校准闭环,保障激光雷达在复杂环境下的测量精度。高稳定性激光雷达定标板特点多维度激光雷达定标技术可校准测距、测角等参数,优化雷达的综合性能。

工业自动化场景(如智能仓储 AGV 导航、生产线零部件尺寸检测)对激光雷达的定位精度要求严苛(±1cm 以内),激光雷达定标板成为关键校准工具。在 AGV 导航中,激光雷达需通过定标板建立车间坐标系:将定标板固定在车间墙角(已知坐标位置),AGV 搭载的激光雷达扫描定标板,通过已知反射率(50% 标准反射率)与距离数据,修正自身定位偏差(避免因地面磨损、传感器老化导致的定位漂移,漂移量超 3cm 会导致 AGV 撞库)。在零部件尺寸检测中,激光雷达需先通过定标板校准 “距离 - 尺寸” 映射关系:例如检测 500mm 长的金属零件,用 1m 处的定标板(反射率 90%)校准后,激光雷达测量误差可从 ±2mm 降至 ±0.5mm,确保零件尺寸合格判定准确。工业场景定标板需具备 “高刚性 + 抗油污” 特性,选用金属框架支撑的高分子复合材料定标板,表面做防油污涂层(接触角≥110°,油污可轻松擦拭),适配车间油污环境,定标周期为 3 个月(因车间粉尘多,易附着表面影响反射率),确保工业自动化流程稳定运行。
激光雷达定标板使用中可能出现反射率异常、板面损伤、安装偏差等故障,需掌握科学排查方法。反射率异常(定标时反射率数据波动超 ±3%):首先检查板面清洁度(用无尘布擦拭表面,若反射率恢复正常,说明是灰尘导致);其次检测环境温湿度(温湿度骤变超 10℃/20% RH,会导致反射率临时变化,需待环境稳定后重新定标);送机构检测(若清洁、环境正常,可能是材质老化,反射率年衰减超 1.5%,需更换定标板)。板面损伤(出现划痕、开裂):轻微划痕(深度<0.1mm)可用细砂纸(2000 目)轻轻打磨,再检测反射率变化≤0.5%,可继续使用;深度划痕(>0.1mm)或开裂会导致反射率局部下降 5% 以上,需更换定标板,避免影响定标精度。安装偏差(定标数据与历史数据偏差超 ±2cm):用激光准直仪检查垂直度(偏差超 ±1° 需重新校准);用标准距离尺复核距离(误差超 ±1cm 需调整定标板位置);检查支架稳定性(若支架松动,需加固后重新测试)。故障排查需记录每次排查过程与结果,建立故障档案,便于后续分析故障原因(如某场景频繁出现反射率异常,可能是环境粉尘多,需缩短清洁周期),保障定标工作高效进行。自清洁激光雷达定标板,表面不易积尘,减少维护频率。

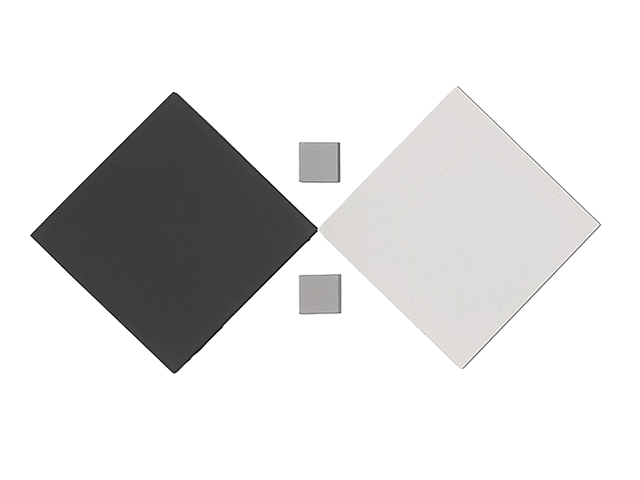
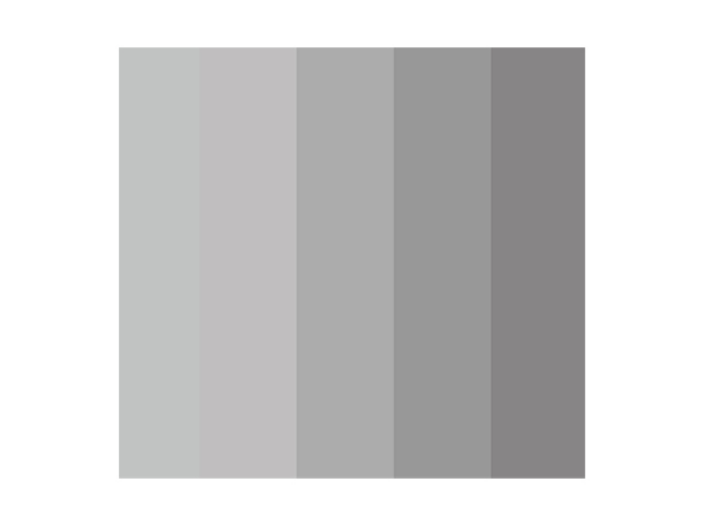
激光雷达定标板是专门用于激光雷达系统(LiDAR)精度校准的标准反射器件,功能是提供已知、稳定的反射率基准,修正激光雷达因硬件老化、环境干扰、安装偏差导致的测量误差(如距离偏差、反射率识别偏差)。激光雷达通过发射激光束并接收回波计算目标距离与反射特性,若无定标板校准,长期使用后距离测量误差可能从 ±2cm 扩大至 ±10cm,反射率识别偏差超 15%,严重影响自动驾驶、环境监测等场景的可靠性。定标板的价值在于建立 “测量值 - 真实值” 的对应关系,例如通过已知反射率(如 10%、50%、90%)的定标板,让激光雷达学习不同反射率的回波信号特征,避免将低反射率的黑色物体误判为远距离目标,或高反射率的白色物体误判为近距离目标,确保激光雷达在全场景下的测量精度符合行业标准(如自动驾驶激光雷达要求距离误差≤±3cm,反射率识别误差≤5%)。瑞科激光雷达定标板兼容性广,可与国内外主流品牌激光雷达设备完美匹配使用。汽车无人驾驶激光雷达标定板一站式采购
专业激光雷达定标服务可精确修正测距误差,保障自动驾驶设备的环境感知精度。10%反射率激光测距板销售
激光雷达定标板需定期送专业机构校准,周期受使用频率、环境条件、材质特性影响,不可一概而论,需科学制定以确保反射率基准稳定。实验室定标场景(每周使用 1-2 次,常温常湿环境,PTFE 材质):校准周期为 1 年,因实验室环境稳定,定标板表面磨损少,反射率年衰减≤0.5%,无需频繁校准;若使用高分子复合材料,可延长至 1.5 年校准 1 次(反射率年衰减≤0.3%)。自动驾驶户外定标场景(每月使用 3-4 次,户外环境,高分子复合材料):校准周期为 6 个月,户外灰尘、紫外线会加速定标板老化,每月使用 3 次以上时,反射率半年衰减可能达 0.8%-1.0%,需缩短校准周期;若环境恶劣(如多沙尘、高湿度地区),需缩短至 4 个月校准 1 次。10%反射率激光测距板销售
与激光雷达定标板相关的文章

激光雷达目标板
- 高稳定性激光雷达测试板价钱 2026-04-22
- 90%反射率激光雷达定标板品牌 2026-04-22
- 耐用激光测距板特点 2026-03-03
- 广州低反射率激光测距板厂家 2026-03-03
- 广州低反射率激光雷达定标板销售 2026-03-03
- 广州智能码头-激光雷达测试板定制 2026-03-03
- 广州高反射率激光雷达测试板定制 2026-03-03
- 广州目标定位用激光测距板厂家 2026-03-03
- 广州环光源均匀性分布测试用激光测距板使用注意事项 2026-03-02
- 广州背光照明用激光雷达测试板批发 2026-03-02
- 高反射率激光雷达测试板品牌推荐 2026-03-02
- 10%反射率激光测距板销售 2026-03-02
与激光雷达定标板相关的产品



与激光雷达定标板相关的新闻
-
防水激光测距板费用 2026-03-01 06:02:20激光雷达定标板的基础功能与特性激光雷达定标板作为激光雷达系统校准的关键部件,重心作用是为设备提供稳定、可溯源的反射参考基准。其表面通常采用高漫反射材料制成,能在较宽的波长范围内(一般覆盖 400-1700nm,适配多数激光雷达的工作波段)保持均匀的反射率,且反射率数值可根据需求定制(从 10% 到 ...
-
广州空间遥感-激光雷达标定板定制 2026-03-01 03:02:28激光雷达定标板的反射率特性是其重心性能指标之一,通常需要根据具体应用场景确定合适的反射率范围。市面上常见的定标板反射率涵盖从 1% 到 99% 的多个档位,不同反射率的定标板适用于不同的校准需求。例如,在高精度测绘场景中,为了确保激光雷达能够准确捕捉远距离目标的信息,通常会选用高反射率(如 80% ...
-
广州耐用激光雷达定标板品牌 2026-03-01 10:01:54激光雷达定标板使用中可能出现反射率异常、板面损伤、安装偏差等故障,需掌握科学排查方法。反射率异常(定标时反射率数据波动超 ±3%):首先检查板面清洁度(用无尘布擦拭表面,若反射率恢复正常,说明是灰尘导致);其次检测环境温湿度(温湿度骤变超 10℃/20% RH,会导致反射率临时变化,需待环境稳定后重...
-
无人驾驶距离测试用激光雷达标定板价钱 2026-03-01 08:02:25常规定标板无法满足部分特殊场景需求,定制化服务可针对性解决 “特殊尺寸、特殊反射率、特殊结构” 问题。特殊尺寸定制方面,可根据设备安装空间设计异形尺寸,如为狭小生产线定制 0.3m×1.5m 的长条状定标板,或为大型户外测试场定制 10m×10m 的拼接式定标板(拼接缝隙≤0.5mm,用密封胶填充,...
与激光雷达定标板相关的问题
新闻资讯
产品推荐
-

影像设备-漫反射定标板一站式采购
2026-04-22 -
抗氧化漫反射定标板供应商
2026-04-22 -
高反射率漫反射定标板哪家好
2026-04-22 -

佛山纯石英光纤合作
2026-04-16 -
2000波长石英光纤合作
2026-04-15 -
成都石英光纤多少钱
2026-04-15 -
上海1500波长石英光纤报价
2026-04-15 -
佛山1500波长石英光纤批发
2026-04-15 -
广东纯石英光纤
2026-04-15