
激光对中仪需通过多维度技术设计抵消振动干扰,**保障机制包括:1.光学系统抗振设计双激光束逆向测量:相较于单激光,双光束可通过相位差补偿振动导致的光斑漂移,例如ASHOOTER系列采用635-670nm半导体激光器,长距离(10m)测量时光斑偏移量从单激光的0.003mm/米降至0.001mm/米;...
激光联轴器对中仪基本参数
- 品牌
- HOJOLO,LEAKSHOOTER
- 型号
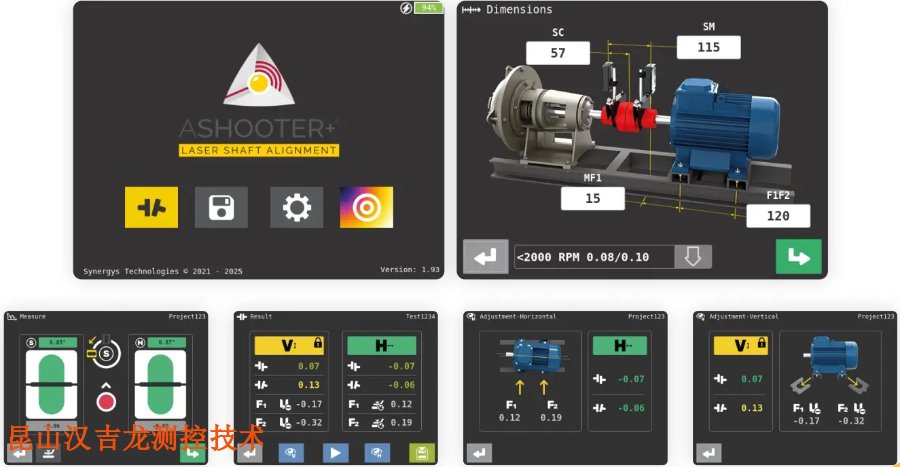
- AS500
- 类型
- 激光对中仪
- 重量
- 1
- 产地
- 苏州
- 厂家
- 汉吉龙测控技术有限公司
激光联轴器对中仪企业商机
激光联轴器对中仪(以HOJOLO系列为**)针对柔性联轴器的校准精度完全适用,且能通过技术适配性优化与场景化校准策略,解决柔性联轴器因“偏差补偿特性”带来的校准难题。以下从适配原理、精度控制方案及实际应用效果展开分析:一、柔性联轴器的校准精度适配性基础柔性联轴器虽具备一定偏差补偿能力(如弹性体可吸收径向偏差、角向偏差1°-2°),但超阈值偏差仍会导致振动加剧、部件磨损加速。激光对中仪的精度优势恰好匹配其校准需求:精度覆盖偏差范围:HOJOLOASHOOTER系列基础精度达±1μm,分辨率,可精细测量柔性联轴器允许的微小偏差(如弹簧体式柔性联轴器允许比较大平行偏差为孔径的3%,以孔径100mm为例,允许偏差3mm,激光对中仪的测量精度可完全覆盖该范围并实现精细化控制);动态偏差捕捉能力:通过双激光束+CCD探测器(1280×960像素),可实时捕捉柔性联轴器运转中的动态偏移(如启动/停止时的弹性形变偏差),较传统百分表法(无法消除法兰不圆度干扰)精度提升100倍。 激光联轴器对中仪操作步骤简化,单人即可完成全套校准流程。耦合激光联轴器对中仪校准规范
激光联轴器对中仪
激光联轴器对中仪短时间内重复校准的精度数据并非***一致,而是存在“可控重复性偏差”,其一致性水平由仪器自身性能、操作规范性及环境稳定性共同决定。结合行业标准(如JJF(浙)1196-2023)与实际应用场景,可从重复性指标定义、影响因素及数据验证方法三方面***解析:一、精度数据重复性的量化标准激光对中仪的重复性精度有明确行业校准规范,**指标需满足“多次测量结果的离散度≤仪器标称精度的1/3”,具体表现为:1.位移与角度重复性的数值范围根据JJF(浙)1196-2023校准规范,激光对中仪需通过10次往复测量计算重复性误差(公式:s=n−11∑i=1n(Di−Dˉ)2,其中Di为单次示值,Dˉ为平均值)。工业级设备的典型重复性表现为:位移重复性:**双激光机型(如HOJOLO双激光系列)可达≤,普通单激光机型通常≤(即1丝);角度重复性:倾角示值变动性≤±2个分辨力,如°分辨力机型的角度重复性偏差≤±°。对比传统百分表(重复性偏差≥),激光对中仪的短时间重复校准数据一致性***更优,但仍存在微小波动(非完全一致)。 ASHOOTER激光联轴器对中仪连接激光联轴器对中仪自带故障诊断功能,可同步排查设备隐性问题。

软脚检测与调整引导(**必备功能)柔性联轴器的弹性补偿易掩盖软脚导致的隐性偏差,需优先选择集成智能软脚检测的机型:检测精度:软脚测量分辨率≥0.001mm(如HOJOLO设备支持0.001mm级位移捕捉),可识别地脚螺栓松紧导致的微小形变;调整引导:仪器需自动计算垫片增减厚度并可视化引导(如HOJOLO主机显示“前地脚需加0.2mm垫片”),避免人工换算误差,比传统千分表法效率提升70%以上。2.多功能集成:提升校准后验证效率部分**机型集成振动分析、红外测温功能,可同步验证柔性联轴器校准效果:振动监测:如法国AS500整合振动模块,校准后可直接检测设备振动速度(需满足ISO10816-3标准:柔性联轴器机组振动≤4.5mm/s),无需额外携带振动仪;数据归档:支持存储1000组以上测量数据(如Easy-laserD450),并可导出PDF报告,包含偏差曲线、调整记录,便于追溯柔性联轴器长期运行偏差变化趋势。
复杂工况下的精度稳定性优势激光对中仪的**优势还体现在动态补偿与抗干扰能力上,这是传统工具难以实现的精度保障机制:环境适应性补偿:**机型(如AS500)集成温度传感器(精度±0.5℃),可实时补偿-20℃~50℃范围内的热胀冷缩误差。例如在钢铁厂高温环境中,轴系热膨胀导致的0.1mm径向偏移可被系统自动修正,而超声波对中仪因声波传播速度受温度影响(每℃变化导致0.17%误差),精度会***下降。振动与安装误差修正:激光对中仪通过高频数据采集(每秒数百次)与动态算法,可过滤设备运行中的微小振动干扰。如HOJOLO系列内置倾角仪,能实时监测测量支架的倾斜角度并自动补偿,避免因安装轻微松动导致的0.02mm以上偏差。而百分表完全依赖机械刚性固定,轻微振动就会导致指针抖动,读数误差增大。长距离测量稳定性:激光对中仪采用635-670nm稳定波长激光,光束发散角极小,配合IP54防护等级的测量单元,在10米范围内精度衰减≤0.005mm。例如在大型压缩机轴系对中(轴间距5米)中,激光对中仪仍能维持±0.01mm的位移精度,而超声波对中仪因声波衰减,5米距离误差会增至±0.05mm以上。校准数据可导出为多种格式,激光联轴器对中仪方便融入企业运维系统。

激光联轴器对中仪校准大跨度轴系时的精度稳定性,取决于激光传输特性适配性、抗干扰技术配置及现场环境控制,通过针对性技术设计(如长距激光优化、多维度补偿算法),主流工业级机型可在30m以内跨距实现稳定精度输出。结合行业应用案例(如汽轮机-发电机轴系、船舶推进轴校准)与技术参数验证,可从跨距适配分级、**稳定机制、场景验证标准三方面展开分析:一、大跨度轴系的界定与激光对中仪的跨距适配分级工业场景中“大跨度轴系”通常指两轴中心距≥5m(如汽轮机-发电机轴系跨距可达10-30m),其校准难点在于激光衰减、环境干扰放大及安装基准偏移,不同机型的跨距适配能力与精度表现差异***:1.基础跨距级(5-10m)典型场景:大型水泵-电机组、风机轴系;技术配置:单激光发射器(功率≥5mW)+普通CCD探测器(分辨率640×480);精度表现:静态环境下位移偏差≤±0.003mm,较短跨距(<5m)的±0.001mm略有下降,但仍满足ISO1940-1对普通旋转设备的对中公差要求(≤0.01mm);局限:跨距超过10m后激光光斑扩散(直径>5mm),易导致探测器信号饱和,精度偏差增至±0.008mm以上。如何选择适合的激光联轴器对中仪来校准柔性联轴器?耦合激光联轴器对中仪校准规范
激光联轴器对中仪针对柔性联轴器,校准精度是否适用?耦合激光联轴器对中仪校准规范
柔性联轴器的专项精度控制方案针对柔性联轴器的弹性形变特性,激光对中仪需通过算法优化与校准流程调整确保精度有效性:动态补偿算法适配:HOJOLO系列搭载柔性联轴器专属校准模式,可输入弹性体材质(如聚氨酯、橡胶)的弹性模量参数,计算偏差补偿余量。例如某化工泵采用聚氨酯弹性联轴器,校准前径向偏差0.12mm,通过算法修正后,实际控制偏差降至0.03mm,避免弹性体过度形变导致的疲劳损伤;多维度偏差协同控制:柔性联轴器常存在径向、角向、轴向偏差的复合叠加,按规范要求,复合偏差需低于单一偏差最大值的1/2。激光对中仪可同步测量三维偏差,例如某风机弹性联轴器校准后,径向偏差0.04mm、角向偏差0.05°,均控制在复合偏差阈值内,振动速度从12mm/s降至4.5mm/s以下,达到ISO10816-3“良好”等级;热态精度保持:通过热膨胀补偿算法(支持输入柔性联轴器弹性体的热膨胀系数),解决温度变化导致的偏差漂移。某炼油厂汽轮机柔性联轴器在70℃工况下,热态偏差从0.08mm修正至0.016mm,精度保持率达80%。耦合激光联轴器对中仪校准规范
与激光联轴器对中仪相关的文章
红外激光联轴器对中仪使用方法
- HOJOLO激光联轴器对中仪校准规范 2026-03-05
- 转轴激光联轴器对中仪校准规范 2026-03-05
- AS500激光联轴器对中仪保修 2026-03-05
- 马达激光联轴器对中仪保修 2026-03-05
- 质量激光联轴器对中仪装置 2026-03-04
- 傻瓜式激光联轴器对中仪操作步骤 2026-03-04
- 昆山激光联轴器对中仪怎么用 2026-03-04
- 教学激光联轴器对中仪的作用 2026-03-04
- 三合一激光联轴器对中仪写论文 2026-03-04
- 耦合激光联轴器对中仪校准规范 2026-03-04
- 电机激光联轴器对中仪定做 2026-03-03
- 爱司激光联轴器对中仪视频 2026-03-03
与激光联轴器对中仪相关的产品

与激光联轴器对中仪相关的新闻
-
专业激光联轴器对中仪保修 2026-03-03 23:03:26激光联轴器对中仪校准大跨度轴系时的精度稳定性,取决于激光传输特性适配性、抗干扰技术配置及现场环境控制,通过针对性技术设计(如长距激光优化、多维度补偿算法),主流工业级机型可在30m以内跨距实现稳定精度输出。结合行业应用案例(如汽轮机-发电机轴系、船舶推进轴校准)与技术参数验证,可从跨距适配分级、**...
-
AS500激光联轴器对中仪校准规范 2026-03-03 05:03:10激光联轴器对中仪(以HOJOLO系列为典型**)校准柔性联轴器需遵循“预处理-精细测量-动态调整-验证归档”的全流程规范,尤其需针对柔性联轴器的弹性形变特性强化软脚处理与动态补偿环节。以下是适配柔性联轴器的详细校准步骤,结合行业实操标准与HOJOLO设备特性展开说明:一、校准前准备:基准条件确认与工...
-
转轴激光联轴器对中仪维修 2026-03-03 12:03:08HOJOLO激光联轴器对中仪长时间使用后,校准精度可能出现漂移,这种漂移是仪器硬件老化、环境累积影响及校准状态变化共同作用的结果,具体成因及表现可从以下三方面分析:一、精度漂移的**成因1.硬件组件的老化与损耗长期使用会导致**部件性能衰减,直接引发精度偏移:激光发射与接收模块:激光二极管(光源)功...
-
云南激光联轴器对中仪 2026-03-03 21:08:09环境因素的累积影响恶劣工况的长期作用会加速精度漂移:温度与湿度老化效应:长期处于温度波动(>2℃/小时)或高湿(>80%RH)环境中,电子元件(如信号处理芯片)的性能参数会发生不可逆漂移,例如温度传感器精度从±0.5℃降至±1℃,导致热补偿功能失效,误差可能增加0.1mm/m。振动与电磁干扰:长期靠...
与激光联轴器对中仪相关的问题
新闻资讯
产品推荐
-
S和M无线激光对中仪定制
2026-03-05 -
常见联轴器对中服务视频
2026-03-05 -
机械设备安装对心校准仪保养
2026-03-05 -

synergys对中仪维修
2026-03-05 -

AS500激光联轴器对中仪保修
2026-03-05 -

国产对中仪服务电话
2026-03-05 -

进口对中仪服务企业
2026-03-05 -

欧洲设备安装对心校准仪写论文
2026-03-05 -

瑞典对中仪怎么用
2026-03-05