- 品牌
- HCX,环城鑫,迈康尼,Mycronic
- 型号
- HM系列
- 类型
- 全自动锡膏印刷机
- 适用材质
- 3C产品的光学,声学,结构件、FPC等辅料贴装
- 适用对象
- PCB(印制电路板)贴二维码标签、胶纸、锅仔片、导热硅胶
- 干燥方式
- 干/湿/真空
- 外形尺寸
- 1100*1300*1500-2000*1800*1800
- 重量
- 900-2000
- 包装
- 按客户需求
- 产品类型
- 全新
- 厂家
- 深圳环城鑫精密制造有限公司
高速精密贴装机是现代消费电子产品大规模制造的基石,其设计哲学是在极限速度下仍能维持微米级的重复精度。为实现这一目标,设备结构通常采用轻量化与高刚性并重的设计,例如使用碳纤维复合材料制造运动部件以降低惯性。双驱动龙门结构或高速旋转塔头成为主流架构,允许多个贴装头并行作业,当一个头在进行贴放动作时,其他头可同步完成取料与视觉对位,从而将空行程时间压缩。驱动系统采用高响应速度的直线电机与数字式伺服驱动器,配合先进的前馈与滤波控制算法,抑制高速启停带来的振动。视觉系统面临巨大挑战,需要在极短的曝光时间内获取无拖影的清晰图像,因此采用全局快门相机与高频脉冲光源成为标配。此外,实时性的系统总线、智能的贴装顺序优化算法以及生产过程中动态吸嘴分配策略,共同保证了设备的整体效能。这类设备是衡量一个电子制造工厂产能与技术水平的关键标志。通过伺服控制系统与高精密丝杆的配合,贴装机实现三轴联动。新疆全自动视觉贴装机功能

贴装机的技术发展始终围绕精度、速度与柔性三大重点展开。精度是确保元器件正确电气连接的基础;速度直接影响了生产线的产出能力;柔性则决定了设备适应多品种、小批量生产模式的能力。为实现高精度贴装,设备制造商需要在机械结构设计、运动控制算法和视觉处理技术上进行深度融合。例如,采用高刚性的机架以减少振动,使用精密线性导轨和丝杠来保证运动平稳,并开发高效的图像处理软件以快速完成定位计算。同时,模块化的设计理念让用户能够根据生产物料的特性选配不同的贴装头和供料器,从而扩展设备的应用范围。深圳环城鑫精密制造有限公司深刻理解市场对设备柔性的需求,其HM系列全自动辅料贴装机提供了丰富的配置选项。客户可根据需要定制贴装头功能、平台加热或选配不同类型的供料器,使设备能够高效地完成各类胶纸、补强片及小型功能部件的贴装任务。华东地区高精密贴片机功能现代贴装机普遍采用伺服电机驱动,配合线性导轨和丝杆,实现稳定准确的运动。
购买设备是一次性行为,而使用设备是长期过程。健全的市场与服务网络对客户而言意味着安心。本地化的服务团队可以快速响应客户的技术咨询、维护需求或培训请求。定期的软件升级和工艺支持能够帮助客户挖掘设备潜能,适应新的生产任务。一个有远见的设备制造商,会持续投入建设其服务能力,将服务视为产品的重要组成部分。这不但能解决客户的后顾之忧,也能通过服务反馈不断改进产品。深圳环城鑫精密制造有限公司与众多客户建立了长期合作关系,其服务理念是支撑合作的重要基础。
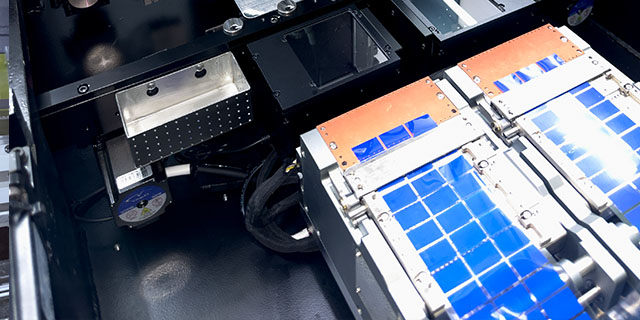
精密辅料贴合对设备的定位精度、压力控制和材料处理能力提出了特殊要求。以贴合手机内部的电磁屏蔽罩或摄像头防护圈为例,这些金属或塑料辅料本身有微小的形变,贴装区域往往空间狭小且周围有凸起的元件。贴装机需要具备高分辨率的视觉系统来识别辅料和产品上的细微特征,采用柔性浮动的贴装头以适应辅料的不平整,并精确控制下压的行程和力度,确保辅料完全就位且不损伤其他部件。对于一些带有背胶的辅料,设备还需精确控制剥离角度和速度,防止胶体变形或产生气泡。精密辅料贴合是提升电子产品内部结构可靠性的关键工序。高精密贴装机对工作环境有一定要求,需保持洁净与稳定。

设备终归需要人来操作和维护,良好的人机交互与维护便利性至关重要。清晰直观的触摸屏界面可以降低操作员的学习门槛,方便进行程序编辑、参数设置和状态监控。模块化的机械设计使得日常保养和故障部件更换更加快捷,减少停机时间。详细的故障诊断信息和维护指引,能帮助工程师快速定位问题。此外,充足的备件供应和技术支持是设备长期稳定运行的保障。一个注重用户体验的厂商,会在设备设计的细节上体现对客户实际使用场景的关怀。深圳环城鑫精密制造有限公司在设备开发中,也注重操作和维护的便捷性设计。贴装机通常包含机械臂、贴装头、送料系统、视觉系统和控制系统等主要部分。广西非标贴装机供应商
自动贴片机的控制系统协调各部件工作,保证整个贴装过程流畅稳定。新疆全自动视觉贴装机功能
随着工业互联网的发展,贴装机的联网与数据集成能力变得愈发重要。设备能否与工厂的制造执行系统(MES)或企业资源计划(ERP)系统对接,实现生产订单自动下发、物料追溯、绩效分析等功能,已成为现代化智能工厂的标配。通过标准化的通信协议,贴装机可以将实时的生产数据,如完成数量、良品数、设备状态等上传至上层系统。这不但实现了生产过程的透明化管理,也为基于数据的生产优化和预测性维护提供了可能。深圳环城鑫精密制造有限公司关注智能制造的发展趋势,其HM系列全自动辅料贴装机具备数据统计与输出功能。设备能够记录并展示UPH、稼动率等关键生产指标,并可支持与外部系统的数据对接,协助客户向智能制造转型升级。新疆全自动视觉贴装机功能
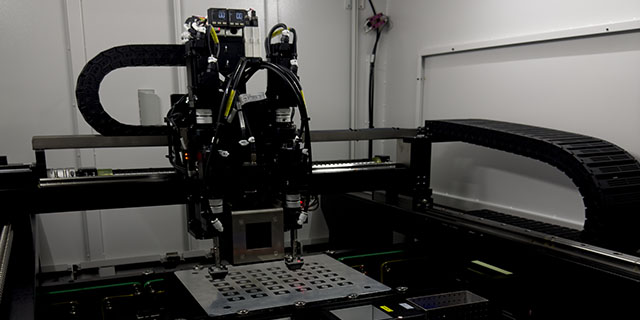
在电子制造领域,全自动贴装机是连接设计与批量化产品的关键物理桥梁。设备内部构造精密而复杂,其工作原理模拟了人类手臂的取放动作,但精度与速度远超人力极限。标准机型包含一个高速移动的龙门式或转塔式结构,其上搭载的贴装头通过真空发生器产生负压,从振动供料器、编带或托盘内抓取微小元器件。取料后,元器件被移送至固定式飞行相机或安装在贴装头上的相机下方进行视觉判读。图像处理系统会即时分析元件的中心位置、旋转角度及引脚共面性,并与PCB板上由基准点确定的坐标系进行比对,生成位置补偿数据。随后,高刚性机械臂在直线电机驱动下,将元件送至已涂抹锡膏的焊盘正上方,在程序设定的Z轴高度释放真空,元件依靠锡膏的粘附力初...
- 新疆全自动视觉贴装机功能 2026-03-14
- 华东地区SMT贴装机销售 2026-03-14
- 内蒙古双头贴片机厂家电话 2026-03-14
- 华东地区辅料贴装机厂家电话 2026-03-14
- 贵州辅料贴装机品牌 2026-03-13
- 广西视觉贴装机供应商 2026-03-13
- 新疆高精密智能贴片机买卖 2026-03-13
- 中国香港高精密贴片机生产厂家 2026-03-13
- 湖南国产贴装机厂家 2026-03-13
- 中国台湾自动辅料贴装机怎么样 2026-03-13
- 云南国产贴装机公司 2026-03-13
- 四川全自动贴装机买卖 2026-03-13
- 云南多功能贴片机品牌厂家 2026-03-13
- 中国台湾视觉贴装机品牌厂家 2026-03-12
- 山东SMT贴片机多少钱 2026-03-12
- 云南双头贴装机品牌 2026-03-12


- 贵州辅料贴装机品牌 03-13
- 广西视觉贴装机供应商 03-13
- 新疆高精密智能贴片机买卖 03-13
- 中国香港高精密贴片机生产厂家 03-13
- 湖南国产贴装机厂家 03-13
- 中国台湾自动辅料贴装机怎么样 03-13
- 新疆高速精密贴装机厂家 03-13
- 四川非标贴片机 03-13
- 贵州SMT贴片机规格 03-13
- 青海非标贴片机 03-13