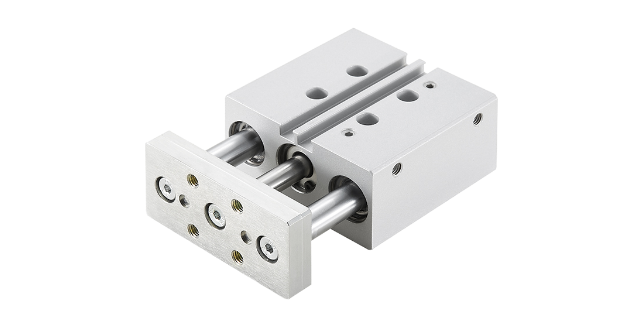
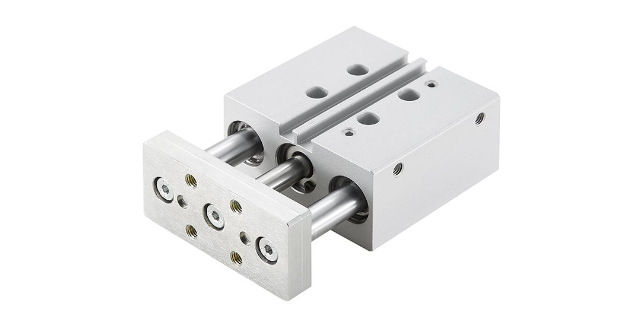
无杆气缸的空间优化方案无杆气缸通过磁耦合或机械密封技术消除活塞杆,显效缩短安装空间。例如,AirTAC 的 HLQ 系列滑台气缸采用循环滚珠导轨,在同等行程下长度较传统气缸减少 40%,特别适合电子设备生产线的窄小工位。磁耦合型无杆气缸因无机械接触,在洁净室环境中表现优异,如医药包装设备中,其防尘等级满足 ISO Class 5 标准。但需注意,磁耦合气缸的负载能力通常低于机械密封型,当轴向负载超过额定值时可能发生脱耦。无杆气缸的空间优化方案无杆气缸通过磁耦合或机械密封技术消除活塞杆,显效缩短安装空间。例如,AirTAC 的 HLQ 系列滑台气缸采用循环滚珠导轨,在同等行程下长度较传统气缸减少 40%,特别适合电子设备生产线的窄小工位。磁耦合型无杆气缸因无机械接触,在洁净室环境中表现优异,如医药包装设备中,其防尘等级满足 ISO Class 5 标准。但需注意,磁耦合气缸的负载能力通常低于机械密封型,当轴向负载超过额定值时可能发生脱耦。推力输出稳定,可保证工作的一致性和准确性。气立可气缸解决方案
物流仓储滚筒分拣机挡停Φ40mm气缸推动挡板弹出,响应时间0.2s,承受包裹冲击力2000N。IP65防护抵抗粉尘,日均动作5万次。AGV货叉升降双Φ100mm气缸同步举升1吨货物,机械锁紧装置防止断电下滑。磁耦传感器实时反馈高度位置,误差±2mm。输送带张紧调节Φ32mm气缸自动调整惰轮位置,张力设定范围100-500N。压力传感器闭环控制,适应不同重量纸箱传输。物流仓储滚筒分拣机挡停Φ40mm气缸推动挡板弹出,响应时间0.2s,承受包裹冲击力2000N。IP65防护抵抗粉尘,日均动作5万次。AGV货叉升降双Φ100mm气缸同步举升1吨货物,机械锁紧装置防止断电下滑。磁耦传感器实时反馈高度位置,误差±2mm。输送带张紧调节Φ32mm气缸自动调整惰轮位置,张力设定范围100-500N。压力传感器闭环控制,适应不同重量纸箱传输。海南气缸体调整气缸位置以适应工作需求。

气缸与 PLC 的控制逻辑设计气缸的自动化控制通常通过 PLC 编程实现,基本控制逻辑包括单缸往复、多缸联动等。单缸往复控制通过电磁阀的通断切换实现气缸的伸出与缩回,配合限位开关实现自动循环;多缸联动则需要设计时序逻辑,确保各气缸动作协调,如装配线上的 “抓取 - 移动 - 放置” 流程。在复杂工况下,可采用步进控制方式,将整个运动过程分解为若干步序,每步序完成后反馈信号至 PLC,再执行下一步动作。控制程序设计时需包含故障诊断模块,当气缸动作超时或传感器异常时,能及时触发报警并停止运行。
标准气缸的模块化设计与系统集成模块化设计通过 "平台化 + 参数化" 实现快速定制:① 接口形式(G1/4、NPT1/8)可选;② 安装方式(法兰、耳轴、脚座)灵活配置;③ 功能扩展(集成消声器、磁性开关)。例如,恒立 QGS 系列可派生出双出轴、多位气缸等 12 种类型,气路设计效率提升 50%。Festo DNC 系列通过预组装阀岛(如 MPA1)实现即插即用,缩短系统调试时间 40%。八、标准气缸的泄漏检测与失效分析泄漏是气缸常见故障,检测方法包括:① 压降测试(ISO 15552 要求每分钟泄漏量≤0.05L);② 气泡法(适用于低压场景);③ 氦质谱检漏(精度达 0.001L/min)。失效原因中,密封件磨损占比 65%,建议每季度检查活塞杆镀硬铬层(厚度≥0.025mm)及刮油器状态。汽车生产线采用三级检测体系(来料抽检 + 在线全检 + 成品抽检),出厂合格率可达 99.9%。薄型气缸对气源的质量要求相对较低,适应性强。
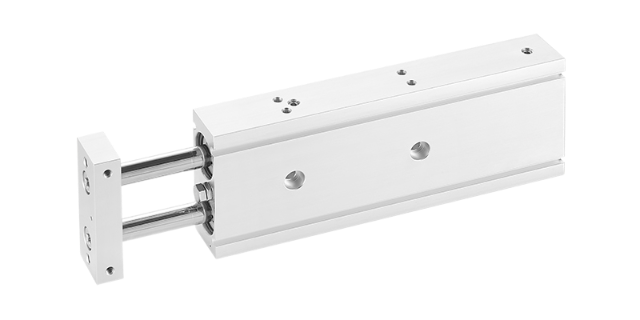
结构设计超薄机身轴向高度≤25mm(Φ16缸),比标准气缸节省30%空间。模块化装配C形扣环/铆合固定结构,支持直接安装无需支架。双杆防偏载Φ32缸抗侧向力达2000N,消除活塞杆弯曲风险。磁性开关多向安装通孔及螺纹孔共用设计,8个方向可调感应位。紧凑脚座选项LB/LC型安装件降低整体高度,适配狭小设备空间。性能参数宽压工作双作用型0.05-1MPa,单作用型0.13-1MPa稳定运行。高速响应比较高运动速度2m/s(无杆型),满足高频动作需求。强缓冲能力聚氨酯缓冲垫吸收90%冲击能,终端降噪25dB(A)。耐温密封氟橡胶(FKM)密封件耐受-40℃~150℃极端环境。双倍寿命硬铬活塞杆+PTFE涂层,寿命提升至500万次。微力控制低摩擦结构启动压力*0.03MPa(LA节能型)。节能高效是薄型气缸的显效优势之一。江西恒立气动气缸
其轻薄的外形,使设备整体结构更加简洁美观。气立可气缸解决方案
摆动气缸的工作原理与角度控制摆动气缸通过压缩空气驱动活塞或叶片旋转,输出一定角度的摆动运动,常见的有齿轮齿条式和叶片式两类。齿轮齿条式摆动气缸通过齿条与齿轮的啮合将直线运动转化为旋转运动,可实现 0°~360° 任意角度的调节;叶片式摆动气缸则利用叶片在缸体内的旋转直接输出扭矩,通常摆动角度小于 270°。在装配机器人的腕部关节,摆动气缸可精细控制抓取机构的旋转角度;在阀门自动化控制中,其快速响应能力可实现阀门的迅速启闭。气立可气缸解决方案