- 品牌
- HCX,环城鑫,迈康尼,Mycronic
- 型号
- HM系列
- 类型
- 全自动锡膏印刷机
- 适用材质
- 3C产品的光学,声学,结构件、FPC等辅料贴装
- 适用对象
- PCB(印制电路板)贴二维码标签、胶纸、锅仔片、导热硅胶
- 干燥方式
- 干/湿/真空
- 外形尺寸
- 1100*1300*1500-2000*1800*1800
- 重量
- 900-2000
- 包装
- 按客户需求
- 产品类型
- 全新
- 厂家
- 深圳环城鑫精密制造有限公司
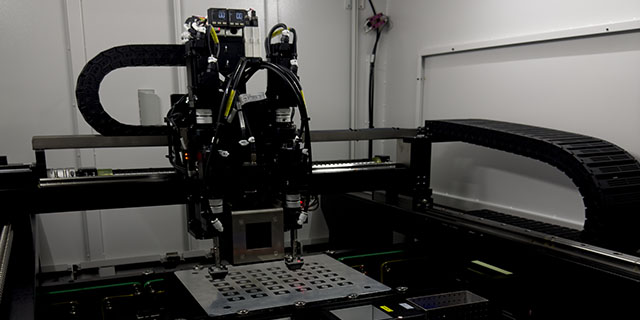
高速精密贴装机是现代消费电子产品大规模制造的基石,其设计哲学是在极限速度下仍能维持微米级的重复精度。为实现这一目标,设备结构通常采用轻量化与高刚性并重的设计,例如使用碳纤维复合材料制造运动部件以降低惯性。双驱动龙门结构或高速旋转塔头成为主流架构,允许多个贴装头并行作业,当一个头在进行贴放动作时,其他头可同步完成取料与视觉对位,从而将空行程时间压缩。驱动系统采用高响应速度的直线电机与数字式伺服驱动器,配合先进的前馈与滤波控制算法,抑制高速启停带来的振动。视觉系统面临巨大挑战,需要在极短的曝光时间内获取无拖影的清晰图像,因此采用全局快门相机与高频脉冲光源成为标配。此外,实时性的系统总线、智能的贴装顺序优化算法以及生产过程中动态吸嘴分配策略,共同保证了设备的整体效能。这类设备是衡量一个电子制造工厂产能与技术水平的关键标志。贴装机能够处理从小型电阻电容到大尺寸IC芯片的各种元器件。云南高精密贴片机品牌厂家

贴装机作为自动化产线的一个环节,其价值在于无缝集成。全自动视觉贴装机通常配备标准的通讯接口,能够与上板的锡膏印刷机、下板的回流焊或组装线进行数据和物流联动。实现全自动化的关键在于设备的稳定性和智能性:稳定保证连续运行不中断,智能则能处理一些异常情况,如物料缺料预警、贴装失败标记等。一台易于集成的设备可以降低整个产线的调试复杂度,提升整线效率。供应商对SMT整体工艺的理解,直接影响其设备在集成中的表现。深圳环城鑫精密制造有限公司专注于SMT设备领域,其产品设计充分考虑了产线集成的便利性。中国澳门视觉贴装机供应商贴装机可根据客户需求定制加热贴装头、平台加热或压力反馈等功能。
高精密贴装机是电子微组装领域的战略级装备,其技术内涵远超常规的批量贴片范畴。这类设备通常服务于芯片级封装、系统级封装、光电子器件集成及微机电系统组装等前沿应用,对精度的要求达到亚微米乃至纳米级别。为实现这一目标,设备基础架构必须极端稳定,常采用低热膨胀系数的天然花岗岩或陶瓷作为底座,并将主要运动模块置于温控环境中。驱动系统多选用直接驱动直线电机,搭配纳米级分辨率的光栅尺实现全闭环位置反馈,消除背隙与摩擦的影响。视觉系统则需集成超高分辨率的远心镜头相机,并结合干涉测量或共聚焦扫描技术,实现对焊球、凸点或导线键合点三维形貌的精确测量。此外,力-位移混合控制技术使得贴装头能在接触工件时实现毫牛级压力的精确施加,保护脆弱的晶圆或裸芯片。这类设备不只是机械与光学的结晶,更是复杂软件算法的载体,需要实时处理海量的传感器数据并进行多变量补偿。其研发与制造能力,往往成为一个国家或地区在电子制造装备领域技术自主性的重要标志。
在消费电子等领域,产品更新换代迅速,要求生产线兼具高速与精密双重特性。高速精密贴装机应运而生,它必须在极短的节拍内完成微米级的贴装。这要求设备的机械结构具有极高的刚性和动态响应性能,以抑制高速运动带来的振动。同时,视觉系统需要在毫秒级时间内完成图像的采集、处理和位置反馈。伺服驱动与高精度编码器的配合,确保了运动轨迹的平滑与终点位置的准确。速度与精度这对矛盾的统一,是设备综合设计水平的集中体现。深圳环城鑫精密制造有限公司生产的贴装机,在设计上便注重高速运动下的精度保持,以满足快速迭代的生产需求。贴装机的广泛应用,为智能手机等消费电子产品的快速迭代提供了坚实的技术与产能支持。

精密辅料贴合对设备的定位精度、压力控制和材料处理能力提出了特殊要求。以贴合手机内部的电磁屏蔽罩或摄像头防护圈为例,这些金属或塑料辅料本身有微小的形变,贴装区域往往空间狭小且周围有凸起的元件。贴装机需要具备高分辨率的视觉系统来识别辅料和产品上的细微特征,采用柔性浮动的贴装头以适应辅料的不平整,并精确控制下压的行程和力度,确保辅料完全就位且不损伤其他部件。对于一些带有背胶的辅料,设备还需精确控制剥离角度和速度,防止胶体变形或产生气泡。精密辅料贴合是提升电子产品内部结构可靠性的关键工序。自动贴片机利用机械臂和真空吸嘴,配合供料系统完成元器件的抓取与放置。吉林多功能贴装机源头厂家
辅料贴装机用于贴合保护膜、散热片等材料,具备高度的灵活性和定位精度。云南高精密贴片机品牌厂家
从生产厂家直接采购设备,通常能获得多方面的优势。主要是在价格沟通上更为透明,减少了中间环节。更重要的是,客户能够更深入地了解设备的生产过程、质量控制体系和研发背景,甚至可以根据自身需求参与部分定制环节的讨论。工厂直供也意味着技术支持和问题反馈的路径更短,信息传递更准确。对于有大批量采购或长期合作意向的客户,与源头厂家建立联系是更具战略意义的选择。深圳环城鑫精密制造有限公司作为设备的生产厂家,能够为客户提供直接的沟通与合作渠道。云南高精密贴片机品牌厂家
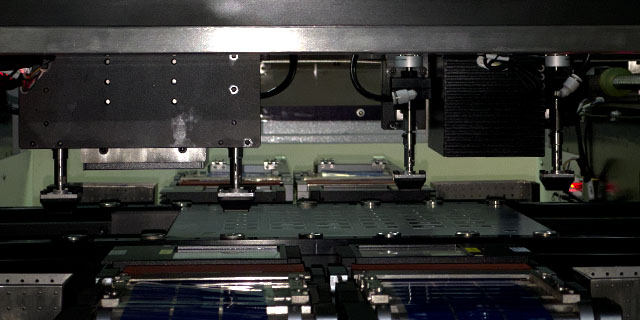
在电子制造领域,全自动贴装机是连接设计与批量化产品的关键物理桥梁。设备内部构造精密而复杂,其工作原理模拟了人类手臂的取放动作,但精度与速度远超人力极限。标准机型包含一个高速移动的龙门式或转塔式结构,其上搭载的贴装头通过真空发生器产生负压,从振动供料器、编带或托盘内抓取微小元器件。取料后,元器件被移送至固定式飞行相机或安装在贴装头上的相机下方进行视觉判读。图像处理系统会即时分析元件的中心位置、旋转角度及引脚共面性,并与PCB板上由基准点确定的坐标系进行比对,生成位置补偿数据。随后,高刚性机械臂在直线电机驱动下,将元件送至已涂抹锡膏的焊盘正上方,在程序设定的Z轴高度释放真空,元件依靠锡膏的粘附力初...
- 吉林精密辅料贴片机牌子 2026-03-29
- 新疆双头贴装机销售 2026-03-29
- 中国台湾全自动贴装机功能 2026-03-29
- 广西高速精密贴片机多少钱 2026-03-29
- 华南地区全自动贴片机供应商 2026-03-29
- 西藏全自动贴片机报价 2026-03-29
- 辽宁多功能贴装机规格 2026-03-29
- 青海贴装机怎么样 2026-03-29
- 四川国产贴片机工厂 2026-03-29
- 湖北全自动贴片机报价 2026-03-28

- 四川自动贴片机品牌 2026-03-28
- 内蒙古全自动贴片机怎么样 2026-03-28
- 华南地区高速贴片机怎么样 2026-03-28
- 辽宁高精密智能贴片机买卖 2026-03-27
- 河南SMT设备贴装机品牌厂家 2026-03-27
- 湖北高速贴装机源头厂家 2026-03-27



- 中国台湾全自动贴装机功能 03-29
- 广西高速精密贴片机多少钱 03-29
- 华南地区全自动贴片机供应商 03-29
- 西藏全自动贴片机报价 03-29
- 江西印刷机怎么样 03-29
- 辽宁多功能贴装机规格 03-29
- 青海贴装机怎么样 03-29
- 成都电子行业印刷机 03-29
- 四川国产贴片机工厂 03-29
- 湖北全自动贴片机报价 03-28