- 品牌
- 汇像
- 型号
- MR6
- 重量
- 105KG
- 产地
- 上海
- 厂家
- 汇像
- 臂展
- 625mm
- 重复定位精度
- +/-0.05mm
- 负载
- 3kg
- 平均功率
- 150W
- 工具速度
- 1500mm/s
- 末端工具
- 力控抓手:支持距离 力矩双模式控制, 夹持力0-140N
- 导航方式
- 双激光雷达SLAM
- 综合续航
- 10h
- 尺寸(长*宽*高)
- 800mm*560mm*600mm
- 驱动形式
- 双轮差速
汇像 HelenX-MR6 移动机器人作为实验室自动化重要载体,将移动底盘与协作机械臂结合,可突破固定工位限制,实现跨房间、跨楼层样本与试剂转运。机器人支持自主呼叫电梯、识别门禁信号,在多层建筑实验室中完成长距离任务流转,减少人工跨区传递带来的时间损耗与样本污染风险。机身采用轻量化结构设计,转弯半径小,能在狭窄过道与密集仪器区域灵活穿梭,适应各类实验室空间布局。末端可更换夹爪、移液头等执行部件,适配离心管、孔板、试剂瓶等多种实验耗材,动作一致性表现良好,有助于提升实验数据的重复稳定性。设备支持图形化编程与拖拽示教,操作人员无需专业编程基础即可快速配置任务流程,可接入实验室管理系统实现数据同步记录,为高通量实验与无人值守作业提供硬件支撑。汇像 HelenX-MR4 移动机器人优化实验室流程。天津4轴移动机器人供应商

汇像科技移动机器人专为实验室样本与耗材自动化转运设计,可在高校科研实验室、药企研发中心、第三方检测机构等场景稳定运行,解决人工搬运样本耗时、易出错、易污染的痛点。机器人搭载自主导航系统,无需铺设磁条、二维码等辅助设施,依靠激光雷达与视觉融合定位,在摆放实验台、仪器、通风柜的复杂实验室环境中,精细规划路径、自主避障,平稳完成离心管、孔板、试剂瓶、培养皿等物品的跨区域转运。机身采用轻量化洁净材质,适配超净间、无菌室等特殊环境,表面易清洁消毒,符合实验室卫生规范。支持多任务并行调度,可同时响应多个工位的转运需求,自动规划比较好路线,减少无效往返,提升样本流转效率。操作界面简洁,科研人员可通过平板或 PC 端下发任务、设置转运路线,无需专业编程基础,快速上手部署,助力实验室实现样本流转自动化,降低人工操作带来的样本污染、数据偏差风险。深圳复合移动机器人供应商汇像 HelenX-MR6 移动机器人驱动实验室发展。

在 “危险生化环境” 这类高风险实验室场景中,汇像移动机器人成为安全作业的关键保障。它可代替人工进入危险区域,通过语音交互,机器人导航自主规避环境中的潜在障碍,在有限作业空间内安全移动。机器人 +/-0.05mm 的重复定位精度,能确保在危险环境下也能完成试剂取样、样本转移等操作,避免因操作误差引发安全风险;625mm 的臂展可减少机器人与危险源的直接接触距离,3kg 的负载能力足以承载防护型实验容器,保障危险物料转运安全。同时,无需改造原有危险环境场地,通过点位部署即可快速投入使用,既降低改造过程中的安全隐患,又实现危险场景下实验操作的自动化与安全性,为科研人员提供安全屏障。
汇像科技疾控检测移动机器人,专注批量样本转运与高危样品传递场景,适配疾控中心、临床检验实验室应急检测需求。这款移动机器人具备全流程无接触转运能力,可将采集样本从接收区精细转运至检测区、存储区,减少检测人员与高危样本的直接接触,降低职业暴露风险。导航系统抗干扰能力强,可在人员流动大、设备密集的实验室环境稳定行驶,任务调度灵活,可同时承接多项转运任务,提升样本流转速度。支持远程下发任务、实时监控轨迹,方便管理人员统筹调度,助力疾控机构提升应急检测响应效率。汇像HelenX-MR4/MR6自动化实验室流程优化助手。

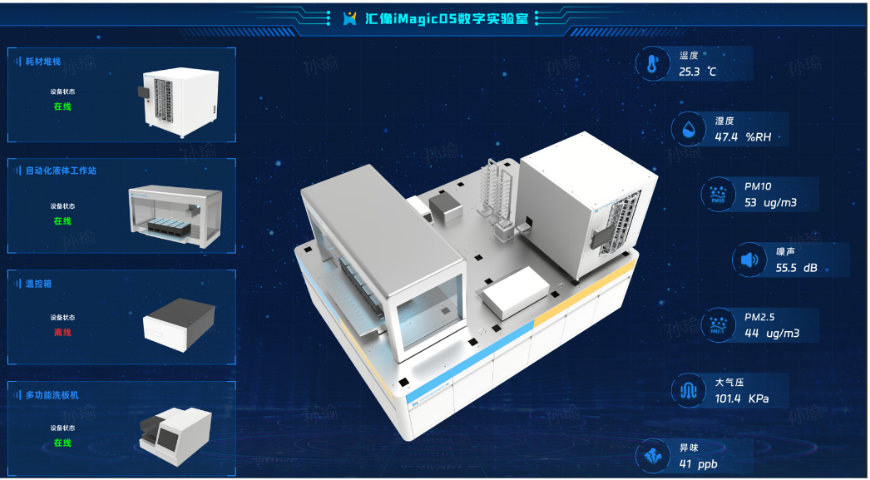
汇像科技移动机器人,以机器人技术和iMagicOS智能化整合智慧中控引擎系统为基础,结合了前沿的人工智能和智能科学实验技术,是实现实验流程自动化和打造智慧实验室的平台。AI移动机器人系统,兼容各类三方设备,旨在帮助人类基础科学从业者,从繁杂琐碎的实验工作中解放出来,聚焦科学研究,加速深度创新。汇像科技是移动机器人的关键力量,也是全球范围内与早期将移动机器人从知识概念落地为实际产品的企业之一,目前已在各领域存在交付实际案例。汇像移动机器人医疗康养护理辅助载体。兰州医疗移动机器人机械臂
汇像 HelenX-MR6赋能生命科学实验准确化。天津4轴移动机器人供应商
在科技飞速发展的当下,政策的风向往往为行业变革指明方向。8月末,有关部门印发《关于深入实施“人工智能+”行动的意见》,为深入实施“人工智能+”行动,推动人工智能与经济社会各行业各领域达成深度融合,重塑人类生产生活范式,促进生产力跃迁和生产关系深层次变革,加快形成人机协同、跨界融合、共创分享的智能经济和智能社会新形态,其中总体要求:到2027年,率先实现人工智能与6大重点领域的深度融合,新一代智能终端、智能体等应用普及率超70%,智能经济产业规模增长,人工智能在公共治理中的作用明显增强,人工智能开放合作体系不断完善。到2030年,我国人工智能实现赋能高质量发展,新一代智能终端、智能体等应用普及率超90%,智能经济成为我国经济发展的重要增长极,推动技术普惠和成果共享。到2035年,我国步入智能经济和智能社会发展新阶段,为基本实现社会主义现代化提供有力支撑。天津4轴移动机器人供应商
在高校的材料科学实验室中,科研人员常常需要对各类新型材料进行微观结构分析与性能测试。汇像 HelenX - MR6 移动机器人在此发挥着关键作用。其较大臂展 625mm,可轻松伸展至实验设备的各个角落,准确抓取小型材料样本。重复定位精度达 +/-0.05mm,这对于需要将样本精确放置在高倍显微镜载物台上,或者送入精密材料检测仪器中的操作来说,至关重要,极大地减少了人为操作可能产生的误差。3kg 的负载能力,足以承载常见的材料样本夹具、小型检测工具等,无论是搬运刚制备好的脆性纳米材料样本,还是转移用于材料性能测试的小型装置,它都能稳定完成任务,为材料科学实验的高效开展提供有力支持,加速科研成果的...
- 青岛国产移动机器人供应商 2026-04-17
- 兰州6轴移动机器人夹爪 2026-04-17
- 长沙国产移动机器人夹爪 2026-04-17
- 海口自主移动机器人厂商 2026-04-17
- 天津4轴移动机器人供应商 2026-04-17
- 广州国产移动机器人价格 2026-04-17
- 大同医疗移动机器人底盘 2026-04-17
- 武汉6轴移动机器人设备 2026-04-17
- 青岛医疗移动机器人夹爪 2026-04-17
- 杭州6轴移动机器人公司 2026-04-17


- 激光移动机器人 2026-04-17
- 银川医疗移动机器人价格 2026-04-17
- 烟台移动机器人厂商 2026-04-17
- 天津AGV移动机器人设备 2026-04-17
- 移动机器人外观设计 2026-04-17
- 长春人工智能移动机器人供应商 2026-04-17




- 包头数据智能实验室管理平台 04-26
- 智能测试仪 04-26
- 湖州数据智能实验室设备 04-26
- 常州机械臂夹爪 04-26
- 南昌机械臂定制 04-26
- 福州人工智能实验室管控系统 04-26
- 嘉兴智慧智能实验室控制系统 04-26
- 大同自动机械臂设备制造厂家 04-26
- 常州人工智能实验室仪器 04-26
- 济南工业机械臂定制 04-26