- 品牌
- 大疆,中飞遥感
- 型号
- YF30型
- 分类
- 显示,电机,电源,飞行器,连接器,控制板
- 产地
- 苏州
- 厂家
- 苏州逸飞智航建筑科技有限公司
随着无人机技术、传感器技术的不断进步,无人机高空森林防火的设备与技术持续升级创新,大幅提升了森林防火的监测能力与处置效率。设备升级方面,一是无人机机型升级,出现了长续航、抗风、耐高温、防水的森林防火无人机,续航时间可达4小时以上,可实现大范围、长时间的监测作业;二是传感器升级,红外热成像相机的精度不断提升,可识别0.1℃的温度差异,快速发现初期火情(暗火、阴燃火),同时搭载气体传感器,可检测森林火灾产生的烟雾浓度,辅助判断火势大小;三是辅助设备升级,配备了无人机充电基站、通讯中继设备,实现无人机的自动充电、持续飞行,解决了无人机续航不足、通讯不畅的问题。技术创新方面,一是智能火情识别技术,通过AI算法对无人机拍摄的影像进行自动分析,快速识别火情,区分火情,减少误报率;二是自主巡航监测技术,无人机可根据预设航线,实现自主巡航、自动避障、自动报警,无需操作人员全程操控;三是多设备协同监测技术,将无人机与卫星、地面监测站、直升机相结合,形成立体化的森林防火监测网络,提升火情发现与处置效率。 无人机高空渔业监测选用防水机型,飞行高度5-10米,可监测水质与鱼类活动状态。镇江创新高空作业

无人机高空电力巡检是替代传统人工巡检的高效解决方案,优势在于安全、高效、全覆盖,适用于高压输电线路、变电站、配电台区等场景。实操中需严格遵循作业规范,首先完成设备检查,确认无人机电池电量充足、螺旋桨无破损、传感器(红外、可见光)正常,同时检查遥控器信号、GPS定位精度,避免在雷雨、大风(风力超过6级)、高温或低温环境下作业。作业时,操作人员需保持与无人机的可视距离,高度控制在输电线路上方5-10米,沿线路匀速飞行,速度不超过8m/s,重点拍摄导线、绝缘子、金具、杆塔等关键部位,排查导线断股、绝缘子破损、金具松动等隐患。红外巡检需重点关注设备接头、绝缘子的温度异常,及时标记故障点坐标。作业后,需导出巡检数据,对影像资料进行逐一分析,生成巡检报告,明确故障位置、类型及整改建议,同时做好无人机的清洁、保养与电池存放,确保设备下次正常投入使用。整个过程需严格遵守电力安全规程,避免无人机触碰线路引发短路,保障作业人员与电力设备安全。 宿迁无人机高空作业便捷无人机高空考古勘探用倾斜摄影建模,完整记录遗址细节,避免破坏考古现场。

为应对无人机高空电力巡检过程中的突发情况(如无人机失控、坠落、触电、设备故障等),需制定完善的应急处置预案,并定期开展应急演练,提升应急处置能力,确保人员与设备安全。应急处置预案主要包括预案总则、应急组织机构与职责、应急响应流程、应急处置措施、后期处置五个部分。预案总则明确应急处置的目的、适用范围、工作原则;应急组织机构明确各部门、各人员的职责,确保应急处置工作有序推进;应急响应流程明确突发情况的上报、启动、处置、结束等环节;应急处置措施针对不同突发情况制定具体的处置方法,如无人机失控时,立即启动失控保护装置,引导无人机迫降至安全区域;无人机触电时,立即切断线路电源,禁止人员靠近,待确认安全后回收设备;设备故障时,立即停机,排查故障原因,无法现场修复的,启用备用设备。应急演练方面,定期组织巡检人员开展应急演练,模拟各类突发情况,演练应急处置流程与措施,提升巡检人员的应急反应能力与协同配合能力;演练后及时总结经验,发现预案中的不足,优化应急处置预案,确保预案的实用性与可操作性。
无人机高空农业植保在实际作业中,常遇到漏喷重喷、药剂漂移、作物损伤、设备故障等问题,需针对性采取解决方案,提升作业质量与效率。漏喷重喷问题主要源于航线规划不合理或飞行速度不稳定,解决方案是提前勘察地块,根据地块形状、作物密度规划航线,采用GPS定点飞行模式,确保飞行速度均匀(2-4m/s),同时设置合理的影像重叠度,避免漏喷;作业后对地块进行巡查,及时补喷漏喷区域。药剂漂移问题多由风力过大、药剂浓度过高或喷液量过大导致,解决方案是避开风力超过3级的时段作业,调整药剂浓度与喷液量,选用防漂移喷头,同时控制飞行高度(作物上方1-3米),减少药剂漂移。作物损伤问题主要是药剂浓度过高、喷头距离作物过近或无人机飞行速度过快导致,解决方案是严格按照农药使用说明配比药剂,控制喷头与作物的距离,保持匀速飞行,避免急加速、急转向。设备故障问题(如电池续航不足、喷头堵塞),解决方案是作业前检查设备,备用充足电池,作业中定期清理喷头,避免药剂残留堵塞,作业后及时清洗设备,做好保养工作。 无人机高空工业探伤搭载超声波设备,悬停检测高空工业设备,排查内部裂纹与缺陷。

无人机高空港口巡检是港口运维的高效解决方案,适用于港口码头、集装箱堆场、港口航道等区域的日常巡检,能大幅提升巡检效率,降低运维成本,防范安全隐患。流程分为前期准备、分区巡检、隐患处置、数据归档四个环节。前期准备需检查无人机性能,确认电池、高清相机、红外热成像设备正常,根据港口布局规划巡检航线,划分码头、堆场、航道等巡检区域。分区巡检时,码头区域重点巡检起重机、装卸设备、码头岸线,排查设备破损、岸线渗漏等隐患;集装箱堆场重点巡检集装箱堆放、吊装设备运行情况,排查集装箱倾斜、设备故障等问题;航道区域重点巡检航道通畅情况、航标状态,排查暗礁、杂物等障碍物。隐患处置时,发现隐患立即标记位置、类型,通知相关部门及时整改,跟踪整改进度,确保隐患闭环管理。数据归档时,导出巡检影像、隐患数据,建立港口巡检档案,定期对比分析,优化巡检方案。安全防控方面,作业前向港口管理部门报备,避开港口作业区域、船舶航行路线,控制飞行高度;操作人员需具备专业资质,熟练掌握无人机操作技能,避免无人机碰撞港口设备、船舶。无人机高空应急广播搭载广播模块,可向灾害现场传递救援信息,引导避险。常州本地高空作业便捷
无人机高空交通事件处置快速航拍事故现场,传递数据,辅助事故处理与交通疏导。镇江创新高空作业
无人机高空测绘的精度直接影响测绘成果的质量,其误差来源主要包括无人机自身误差、飞行误差、影像采集误差、后期处理误差四个方面,需采取针对性的控制方法,提升测绘精度。无人机自身误差主要源于无人机的飞行稳定性、GPS定位精度、IMU惯性测量精度,控制方法是选用性能稳定、定位精度高的无人机,作业前对无人机进行校准,确保设备参数正常。飞行误差主要包括飞行高度偏差、飞行速度不稳定、航线偏移等,控制方法是规划合理的飞行航线,采用GPS定点飞行模式,严格控制飞行高度与飞行速度,保持匀速飞行,避免急加速、急转向,同时安排操作人员实时监控飞行状态,及时调整飞行姿态。影像采集误差主要源于相机参数偏差、影像模糊、重叠度不足等,控制方法是作业前对相机进行参数校准,选用高清相机,确保影像清晰,设置合理的影像重叠度(航向重叠度80%以上,旁向重叠度70%以上),避免出现影像漏洞。后期处理误差主要源于软件处理参数设置不合理、控制点布设不足等,控制方法是选用专业的测绘软件,合理设置处理参数,在测区布设足够的地面控制点,用于影像校正,提升后期处理精度。 镇江创新高空作业

无人机高空工业探伤是工业设备维护的重要手段,适用于锅炉、压力容器、钢结构厂房、管道等高空工业设备的探伤检测,能替代人工高空探伤,降低作业风险,提升检测精度,及时发现设备内部缺陷。技术要点包括探伤设备选择、飞行操作、数据解析三个方面。探伤设备选择方面,根据检测需求选用合适的探伤设备,如超声波探伤仪、射线探伤仪,搭载在无人机上,确保设备小巧、轻便、精度高。飞行操作时,规划精细的飞行航线,控制无人机悬停在检测部位前方3-5米,保持飞行平稳,确保探伤设备能精细对准检测部位,采集设备内部缺陷数据。数据解析时,通过专业软件分析探伤数据,识别设备内部的裂纹、气孔、焊缝缺陷等问题,标记缺陷位置、大小、严重...
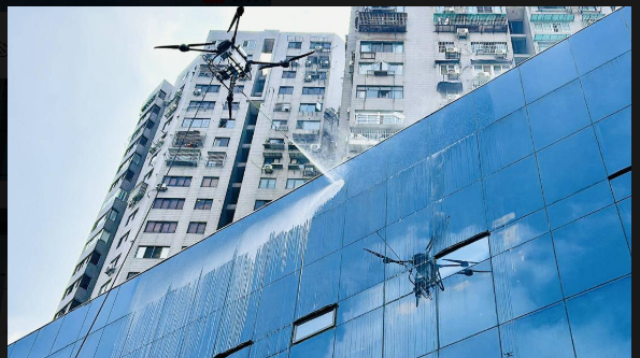
- 徐州清洗型无人机高空作业服务热线 2026-05-17
- 镇江创新高空作业 2026-05-17
- 安徽YF-30型无人机高空作业服务 2026-05-17
- 泰州YF-30型无人机高空作业方案 2026-05-17
- 江苏大楼清洗高空作业 2026-05-17
- 常州YF-50型无人机高空作业选择 2026-05-17
- 宿迁创新高空作业 2026-05-16
- 安徽无人机高空作业特点 2026-05-16
- 上海本地高空作业价格 2026-05-16
- 南通清洗型无人机高空作业优势 2026-05-16



- 镇江咨询高空作业技术 2026-05-16
- 无锡YF-50型无人机高空作业服务 2026-05-16
- 苏州本地高空作业厂家 2026-05-16
- 扬州一站式高空作业特点 2026-05-15
- 常州YF-50型无人机高空作业服务电话 2026-05-15
- 盐城大楼清洗高空作业报价方案 2026-05-15




- 江苏如何低空经济销售方法 05-17
- 镇江创新高空作业 05-17
- 安徽YF-30型无人机高空作业服务 05-17
- 泰州YF-30型无人机高空作业方案 05-17
- 一站式低空经济牌子 05-17
- 江苏大楼清洗高空作业 05-17
- 常州YF-50型无人机高空作业选择 05-17
- 宿迁创新高空作业 05-16
- 上海大楼清洗低空经济资格 05-16
- 安徽无人机高空作业特点 05-16