- 品牌
- ALLIANCE
- 型号
- BWS
- 基材
- 金属
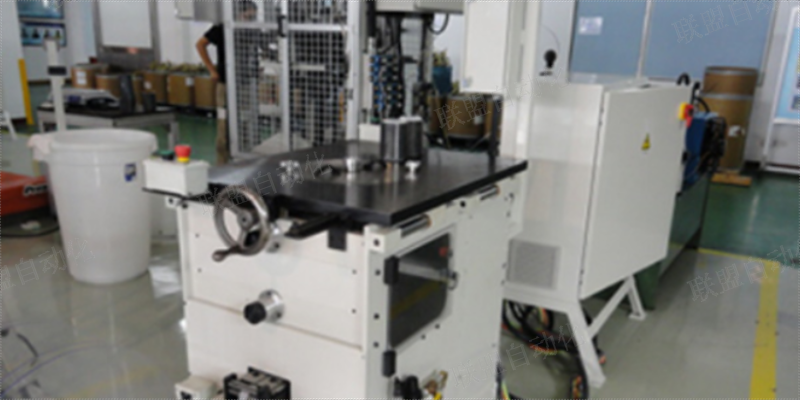
[0063]图17为驱动机构中的主轴与驱动臂以及偏心调整机构的装配结构示意图;[0064]图18为图17中的主轴与偏心调整机构的装配结构示意图;[0065]图19为主轴的结构示意图;[0066]图20为偏心调整机构中的连接座的结构示意图;[0067]图21为滑块机构与排线机构的装配结构示意图;[0068]图22为滑块机构与排线机构剖面结构示意图;[0069]图23为定子铁芯的轴向压紧装置的结构示意图;[0070]图24为压紧套的结构示意图;[0071]图25为护线套的立体结构示意图;[0072]图26为护线套另一个方向的立体结构示意图;[0073]图27为定子铁芯与压紧套以及护线套的剖面结构示意图;[0074]图28为分度机构的剖面图;[0075]图29为分度机构的立体图;[0076]图30为分度机构中的盘体的示意图;[0077]图31为分度机构取走端盖后的示意图;[0078]图32为分度机构中的锁定机构的示意图;[0079]图33为挑线机构的立体结构示意图;[0080]图34为剪线机构的立体结构示意图;[0081]图35为剪线机构中勾线器的立体结构示意图;[0082]图36为剪线机构中切刀的立体结构示意图;[0083]图37为现有技术中的电机定子线圈绕线机的结构示意图;[0084]10为机架、11为架框体、12为安装板、13为上台面板。联盟自动化的电机定子生产线能够实现高效的生产速度,提升生产效率。铜陵进口电机定子生产线
同时空套在外管上的第二齿轮通过主轴上的同步轮驱动齿轮系给与外管一个转动的摆角;外管转动带动绕线模具的绕线头转动。滑块机构升降的同时带动内管升降,同时内管相对外管还有一个升降的动作,从而推动绕线模具的拨叉机构升降,使绕线模具中的三个线嘴能够在绕线的过程中同步伸缩进行排线,实现排绕以及绕线工作,把线嘴中的漆包线绕在定子铁芯的骨架上。[0029]本实用新型为微型电机定子绕线机,适用于无刷电机定子、罩极串激电机定子绕线,漆包线直接绕制在定子铁芯上,与以往的嵌线方式相比,减少漆包铜线既节约成本又提高定子的磁通量,增大了电机功率。适用定子绕线极数可为6极、9极、12极。本实用新型采用伺服电机作动力驱动,拥有自动绕线、自动排线、自动挂线等功能,实现全自动绕线过程。[0030]根据电机的制造工艺,本机在克服了传统的绕线工艺,设计了独特的内排式绕线结构,具体体现为:绕线模具伸入到定子铁芯的内孔中,驱动机构驱使排线机构升降且来回转动,线绕模具随排线机构升降且来回转动时将漆包线绕制到定子铁芯上,即绕线模具的三个线嘴能够在绕线的过程中同步伸缩进行排线,这种结构很大程度上有效的解决了电机定子的槽满率过高这一大难题。虹口区压缩机电机定子生产线定做价格定子生产线的发展趋势是向着更高效、更智能、更环保的方向发展,以满足市场对高性能、高质量电机的需求。

[0091]80为剪线机构、81为支架、810为底座、812为连接座、813为连杆、814为螺纹孔、815为开口、82为安装座、83为直线驱动器、84为勾线器、840为臂、841为爪、842为连接座、843为开口、85为切刀、850为刀头、851为刀体、852为刀座;[0092]90为定子铁芯、90a为骨架、91为外圆台阶、92为过线槽。【具体实施方式】[0093]如图1和图2所示,本实用新型的电机定子铁芯绕线机,由机架10、排线机构20、线绕模具30、驱动机构40、定子铁芯的轴向压紧装置50、分度机构60、挑线机构70、剪线机构80组成,下面分别对每部分和它们之间的相互关系进行详细地说明:[0094]如图1和图2所示,机架10包括架框体11、沿架框体11纵向布置的安装板12、沿架框体11横向布置且位于安装板12上方的上台面板13,安装板12和上台面板13均设置于架框体11上,安装板12位于架框体11的中部且通过螺栓或焊接的方式与架框体11紧固为一体,上台面板13上设有安装定子铁芯90的安装孔。[0095]如图3至图6所示,排线机构20沿机架的纵向布置并支撑在机架的安装板11上,排线机构20包括外管21和部分地被外管包围的内管22。所述外管的周面上部分设置有沿该外管本体轴向延伸的多边形体210。
该凸起664上设有通孔,所述插销662穿过该通孔。[0132]作为锁定机构66的进一步地改进,地所述锁定机构还包括导向块665,该导向块665的一端支撑在气缸660的缸体上,导向块的另一端设有凹槽666,导向块665的支撑在所述缸体上的一端设有贯通到所述凹槽中的孔,所述连接杆661滑动配合在凹槽666中,所述气缸660的活塞杆穿过导向块665上的孔与滑动配合在凹槽666中的连接杆661固定连接。当气缸推动连接杆661以带动插销662升降时,导向块665对连接杆661起到了导向作用,避免连接杆在升降时产生摆动,而造成插销无法准确插入到盘体61上的孔614中。因此,导向块使锁定机构66对盘体61的周向定位起到了辅助作用,使其能够准确且可靠地对盘体61进行周向定位。[0133]分度机构60的工作过程为:通过分度齿轮620带动盘体61转动。而定子托固定在盘体61上。故通过对电机(电机为伺服电机)63的控制、可带动定子铁芯转位分度。盘体61开有12等分定位孔,以用作定子换槽绕线时的分度定位,气缸660带动插销602插入到的盘体上的孔614内,从而实现了定子铁芯的分度定位。[0134]作为传动机构62来说,并不局限于上述分度齿轮与盘轮上轮齿直接哨合的方式。定子生产线在促进科技创新方面也具有重要作用,它能够推动新材料、新技术和新工艺的应用和发展。
所述驱动机构40包括电机41、主轴42、驱动臂43、驱动外管和内管上下运动的滑块机构44、安装在机架安装板12上的支撑座45、驱动外管转动的传动机构46、驱动内管转动的第二传动机构47。[0105]电机41的输出端与主轴42的一端连接,主轴42支撑在机架的安装板12上,主轴42的另一端穿过机架的安装板后偏心地与驱动臂43的一端连接。如图17至图20所示,主轴42穿过机架的安装板12后通过一个偏心调整机构48与驱动臂43连接。如图18所示,所述偏心调整机构48包括可调节地安装在主轴42轴向端部的连接座480、丝杆安装座481以及行程调节丝杆482,所述主轴42轴向端面上设有凹槽420,在凹槽420的两个对称的侧壁面上对称设置一对滑槽421,所述丝杆安装座481固定在主轴42上,行程调节丝杆482位于凹槽420中,行程调节丝杆482的端部与丝杆安装座481连接。所述连接座480的一端设有滑块483,该滑块483的端面上设有螺纹484,滑块483间隙配合在所述滑槽421中后,滑块483与所述行程调节丝杆482螺纹连接,这样,程调节丝杆482与滑块482形成了一个丝杆机构。[0106]如图3、图17和图18所示,当主轴42转动时,主轴42带着驱动臂43转动,由于驱动臂43偏心地与主轴42连接,因此。定子生产线采用先进的检测技术和设备,能够对产品质量进行检测和评估,确保产品的质量和安全性。铜陵进口电机定子生产线
生产线的自动化程度能够减少生产周期和交货时间,提高了客户满意度。铜陵进口电机定子生产线
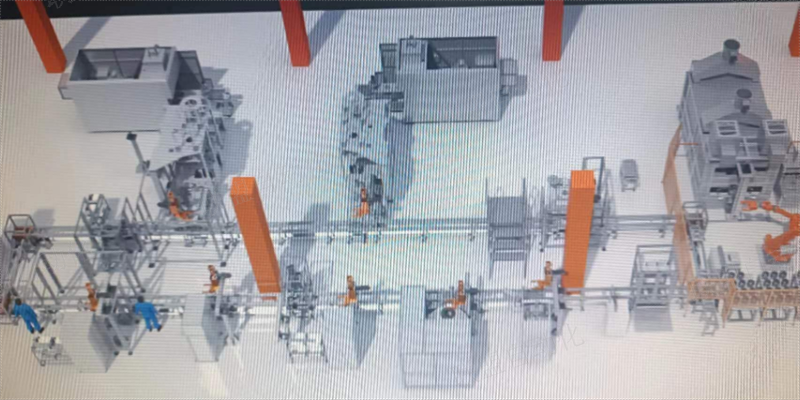
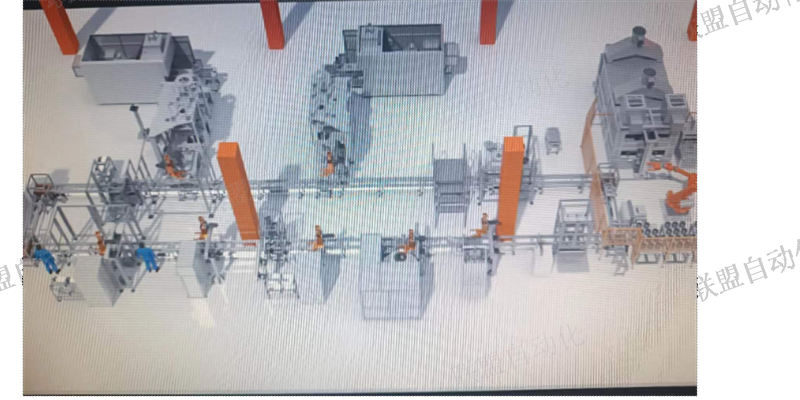
采用数字化虚拟仿真软件DELMIA对整条生产线进行了运动仿真分析,验证了生产线整体布局的合理性,并对工业机器人进行了运动规划、碰撞与干涉检测以及生产节拍的仿真分析和优化。结果表明,仿真优化后的机器人1~机器人4的节拍分别减少到。,对控制系统进行了总体方案设计、网络架构设计以及硬件选型,控制系统采用总线拓扑结构,用PROFIBUS-DP网络进行组网设计,以S7-1200为主站(Master),FANUC机器人控制器为从站(Slave)。规划了控制系统流程图、顺序功能图,系统软件采用模块化编程,将无刷电机定子生产线控制任务划分为公用程序、自动程序、手动程序等若干子任务,进行了人机交互界面设计,实现了上位监控和远程控制等功能,并在TIAPortal软件中进行硬件组态、使用梯形图语言编写程序以及仿真调试,排除程序中不合理之处,从而缩短现场的调试时间。结果表明,该无刷电机定子生产线控制系统能够按照要求节拍完成生产任务,提高了无刷电机定子生产的自动化程度,具有较高的实用价值。【学位授予单位】:合肥工业大学【学位级别】:硕士【学位授予年份】:2018【分类号】:下载全文更多同类文献CAJ全文下载。铜陵进口电机定子生产线
- 江苏压缩机电机定子生产线修理 2024-05-29
- 长宁区电机定子生产线多少钱一台 2024-02-26
- 山西潜水泵电机定子生产线维修电话 2024-02-20
- 宁德电机定子生产线厂家 2024-02-20
- 合肥压缩机电机定子生产线多少钱一台 2024-02-20
- 普陀区全自动电机定子生产线厂家 2024-02-20
- 宁德机器人电机定子生产线厂家 2024-02-20
- 合肥工业电机电机定子生产线定做价格 2024-02-20
- 台州半自动电机定子生产线生产厂家 2024-02-20
- 山东机器人电机定子生产线哪里有 2024-02-19
- 闵行区压缩机电机定子生产线厂家 2024-02-19
- 普陀区电机定子生产线维修价格 2024-02-19