- 品牌
- ALLIANCE
- 型号
- BWS
- 基材
- 金属
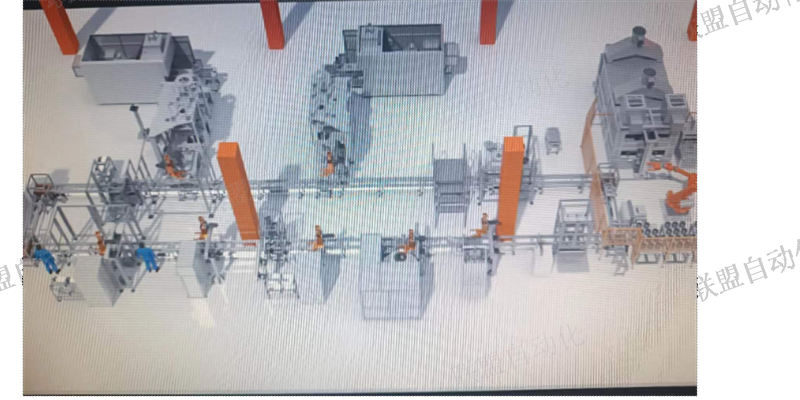
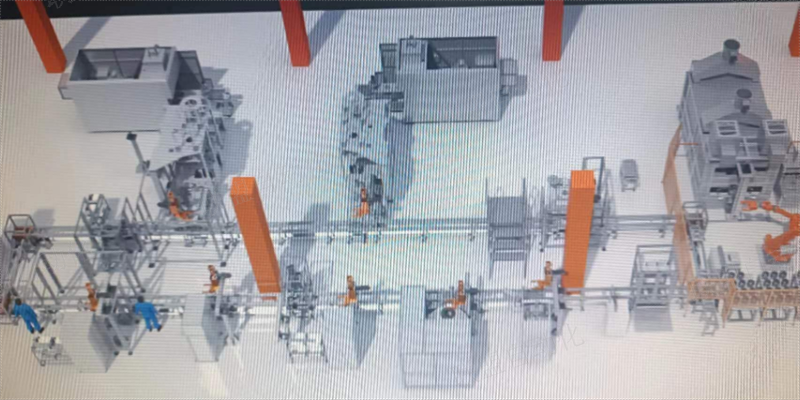
《合肥工业大学》2018年收藏|手机打开手机客户端打开本文基于PLC的无刷电机定子生产线控制系统研究许晓伟【摘要】:随着“中国制造2025”计划的逐步实施,国内依靠廉价劳动力、粗放式发展的制造业,正面临着产业转型升级,多品种、小批量需求己经成为一种趋势。无刷电机在计算机设备、家电产品、医疗器械、汽车、精密电子等行业的广泛应用,使得各大电机生产厂家相继投入大量资金用于无刷电机的研发。传统的无刷电机生产没有自动化的生产线,只有一些自动化专机设备,工序与工序之间靠人工搬运完成,工人劳动强度大,生产环境恶劣,质量无法保证。因此,对无刷电机自动化生产线控制系统的研究具有重要的现实意义。本课题以X公司无刷电机生产线建设为背景,以PLC为控制,用工业机器人将定子生产线中的各专机设备连接起来组成自动化生产线,具体研究内容如下:首先,对无刷电机定子生产线进行了整体规划,分析了人工无刷电机定子生产现状及存在问题,提出了一种以工业机器人进行上下料的无刷电机定子自动化生产工艺,将生产线规划为4个工位并由4台六轴工业机器人完成上下料。经过生产线平衡分析,该生产线平衡率达到了(57s),满足预先设定的目标。其次,在SolidWorks中建立了生产线的三维模型。生产线的自动化程度能够减少人为因素对产品质量的影响,提高了产品的一致性。宁德机器人电机定子生产线推荐厂家
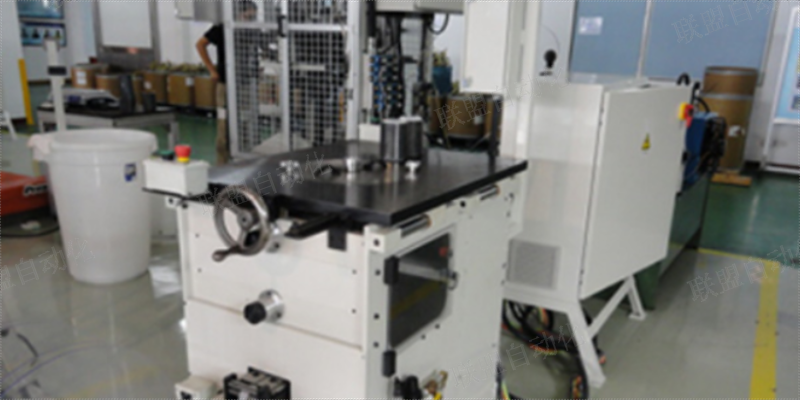
传动机构46包括带轮460、皮带461、传动齿轮箱462、齿轮463、过桥齿轮464以及与外管21周向连接的第二齿轮465,带轮460固定在主轴42上,带轮460通过皮带461与传动齿轮箱462的输入轴连接,传动齿轮箱462的输出轴与齿轮463连接,齿轮463通过过桥齿轮464与第二齿轮465啮合。所述过桥齿轮464由扇形齿轮和与该扇形齿轮同轴的圆柱齿轮组成。传动齿轮箱462的输入轴沿机架的横向延伸,传动齿轮箱462的输出轴沿机架的纵向延伸。第二齿轮465的中心孔呈多边形,其边数与外管21上的多边形体的边数相等,例如可以是三边形、四边形、五边形、六边形、七边形等等,外管21通过多边形体210与第二齿轮465周向定位,当外管21沿其轴向升降时,第二齿轮465还能驱使其转动,即两种动作互不干涉。上述结构中,传动机构46输入的动力来自于主轴42,具体工作过程为:主轴42转动,将动力通过带轮460和皮带461传递到传动齿轮箱462,传动齿轮箱462通过齿轮463将动力传递到过桥齿轮464,过桥齿轮464再将动力传递到第二齿轮465,从而带动外管21转动。传动机构46采用上述布置的优点在于,与升降机构共用了同一个主轴,使传动机构的结构获得了简单,第二,从布置形式上来讲,采用了传动齿轮箱462的结构。杨浦区新能源电机定子生产线有哪些定子生产线的智能化和自动化水平不断提高,能够实现生产过程监控和实时检测,确保生产效率和产品质量。

基于精益生产的“一个流”和生产线平衡的研究[J];企业技术开发;2009年08期中国硕士学位论文全文数据库条1马捷;基于ROBCAD的涂装生产线3D建模及喷涂关键技术研究[D];江苏大学;2016年2林秀木;汽车发动机生产线平衡优化研究[D];沈阳工业大学;2016年3赵云飞;基于遗传算法的生产线平衡改善研究[D];南昌大学;2014年4董诗绘;基于ROBCAD工业机器人规划路径仿真的实现[D];内蒙古大学;2014年5李大朋;定子铁芯自动化生产线的设计[D];长春理工大学;2014年6杭治雨;基于生产线平衡的精益自动化生产改善[D];华东理工大学;2014年7王晓磊;基于PLC的自动包装码垛生产线控制系统设计[D];西安工程大学;2013年8林仕高;搬运机器人笛卡尔空间轨迹规划研究[D];华南理工大学;2013年9李潋;基于PLC的挡纱板自动装配线系统的研究[D];华中科技大学;2013年10陈维余;DYC公司总装生产线平衡问题研究[D];山东大学;2012年【共引文献】中国期刊全文数据库条1李林杰;刘鸿印;王广欣;谭宗宝;;基于DELMIA的铁路货车组装生产过程仿真与研究[J];机械;2015年12期2王建波;王林春;龙罡;罗佳;彭宁涛;简金权;;三维数字化技术在工业厂房设计中的应用[J];工程建设与设计;2015年12期3沈重;郑宏涛;董伟;陈永强;何朔;。
以及[0024]沿定子铁芯轴向布置的护线套,护线套的一端与第二驱动机构连接,所述压紧套环绕在护线套的周围且压紧套与护线套同轴布置。[0025]地,还包括一个分度机构,该分度机构包括上台面板、盘体、传动装置以及电机,上台面板上设有安装孔,盘体上设有台阶孔,盘体的一端可转动地安装在上台面板上的安装孔中,盘体通过传动装置与电机连接。[0026]地,还包括一个挑线机构,该挑线机构包括支架、直线驱动器、第二直线驱动器以及挑线杆,直线驱动器固定在支架上,直线驱动器的动力输出端与第二直线驱动器连接,直线驱动器的动力输出端的轴向,与第二直线驱动器的动力输出端的轴向之间的夹角为15至135度,所述挑线杆连接于第二直线驱动器的输出端。[0027]地,还包括一个剪线机构,该剪线机构包括支架、安装座、直线驱动器、勾线器、切刀,安装座固定在支架上,直线驱动器固定在安装座上,勾线器的一端与直线驱动器的动力输出端连接,切刀固定在安装座上后,切刀位于勾线器的一侧且与勾线器相向,切刀的刀头向直线驱动器的轴向延伸。[0028]本实用新型的绕线原理为:驱动机构驱动主轴转动,主轴带动驱动臂升降动作,驱动臂带动滑块机构升降,外管随滑块机构升降。采用自动化生产线可以实现生产过程的快速调整和灵活性,适应市场需求的变化。

同时空套在外管上的第二齿轮通过主轴上的同步轮驱动齿轮系给与外管一个转动的摆角;外管转动带动绕线模具的绕线头转动。滑块机构升降的同时带动内管升降,同时内管相对外管还有一个升降的动作,从而推动绕线模具的拨叉机构升降,使绕线模具中的三个线嘴能够在绕线的过程中同步伸缩进行排线,实现排绕以及绕线工作,把线嘴中的漆包线绕在定子铁芯的骨架上。[0029]本实用新型为微型电机定子绕线机,适用于无刷电机定子、罩极串激电机定子绕线,漆包线直接绕制在定子铁芯上,与以往的嵌线方式相比,减少漆包铜线既节约成本又提高定子的磁通量,增大了电机功率。适用定子绕线极数可为6极、9极、12极。本实用新型采用伺服电机作动力驱动,拥有自动绕线、自动排线、自动挂线等功能,实现全自动绕线过程。[0030]根据电机的制造工艺,本机在克服了传统的绕线工艺,设计了独特的内排式绕线结构,具体体现为:绕线模具伸入到定子铁芯的内孔中,驱动机构驱使排线机构升降且来回转动,线绕模具随排线机构升降且来回转动时将漆包线绕制到定子铁芯上,即绕线模具的三个线嘴能够在绕线的过程中同步伸缩进行排线,这种结构很大程度上有效的解决了电机定子的槽满率过高这一大难题。该生产线的智能化控制系统能够自动识别和排除生产中的异常情况,提高了生产效率。杨浦区新能源电机定子生产线有哪些
联盟自动化的电机定子生产线能够实现高效的生产速度,提升生产效率。宁德机器人电机定子生产线推荐厂家
双机械端口磁通切换永磁无刷电机及其多模式驱动控制研究[D];江苏大学;2017年中国硕士学位论文全文数据库条1王冰冰;基于软磁复合材料的电动车用永磁无刷电机研究[D];山东大学;2018年2崔波;SMC-Si钢组合铁心盘式横向磁通永磁无刷电机及其驱动控制研究[D];山东大学;2018年3刘跃斌;新型磁极结构的永磁无刷电机解析法建模与磁场分析[D];合肥工业大学;2018年4许晓伟;基于PLC的无刷电机定子生产线控制系统研究[D];合肥工业大学;2018年5王霄;基于矢量控制的永磁无刷电机控制器的设计与实现[D];电子科技大学;2018年6杨飞;旋转导向钻井中导向控制电机的驱动系统研究[D];西安石油大学;2018年7杨荣金;基于无刷电机的空气净化器风机控制系统设计[D];安徽理工大学;2018年8杨深;磁场增强型永磁无刷电机的设计与分析[D];江苏大学;2017年9薛劭申;高速永磁无刷电机设计与控制系统研究[D];北京交通大学;2011年10杨迪;无刷电机研发项目的风险识别与评价[D];上海交通大学。宁德机器人电机定子生产线推荐厂家
- 江苏压缩机电机定子生产线修理 2024-05-29
- 长宁区电机定子生产线多少钱一台 2024-02-26
- 山西潜水泵电机定子生产线维修电话 2024-02-20
- 宁德电机定子生产线厂家 2024-02-20
- 合肥压缩机电机定子生产线多少钱一台 2024-02-20
- 普陀区全自动电机定子生产线厂家 2024-02-20
- 宁德机器人电机定子生产线厂家 2024-02-20
- 合肥工业电机电机定子生产线定做价格 2024-02-20
- 台州半自动电机定子生产线生产厂家 2024-02-20
- 山东机器人电机定子生产线哪里有 2024-02-19
- 闵行区压缩机电机定子生产线厂家 2024-02-19
- 普陀区电机定子生产线维修价格 2024-02-19