柔性复合机器人在进行设计的过程中,所采用的是激光导航的形式进行设计的,施工量小且地面不需要任何诱导线的设计,在路径的改变上十分灵活,系统柔性很大。同时,也采用了激光测量传感器进行设计,激光测量传感器所适用的是低能量脉冲式激光、红外波段,不需要原有点式光源光路进行发散,任何情况下都对人眼无害。激光测量传感器所应用的是侧角及测距的测算方法,位置的信息也是处理器来进行计算的,这样,测量的精确性以及可靠性,还有就是系统的测量速度都能够得到有效保证。达明机器人(上海)有限公司致力于提供复合机器人,欢迎您的来电哦!江苏AMR复合机器人工作原理
达明机器人针对AGV/AMR搭配的复合机器人应用场景,推出直流电源版本的手臂(M系列),透过TM特有的Landmark及TMvision视觉系统建立动态相对坐标体系并实现跨手臂点位共享,弥补AMR行走的运动偏差并定位、平稳取放,非常适用于医疗及半导体行业移动搬运、智能巡检、移动式堆栈、加工机床上下料等要求机动性、精度的应用。这种模块化的设计特点对于机器人期的拆装更换、维护维修等方面是十分便利的。柔性复合机器人的运作是不需要进行任何控制柜的外接的,这对于机器人的抓取、行走等行为的控制来说也十分方便。江苏AMR复合机器人工作原理复合机器人,就选达明机器人(上海)有限公司,用户的信赖之选,有需要可以联系我司哦!

复合型机器人的组成部分包括: 机械臂:复合型机器人通常拥有一个或多个机械臂,可以完成的机械加工、装配和拆卸等工作。机械臂可以是任意数量的关节连接起来的,具有度的自由度和灵活性,可根据任务需要进行调整。 移动平台:移动平台通常是机器人的底盘,它可以让机器人在不同的地面上自由移动。移动平台可以使用轮子、履带或腿来实现,具有度的机动性。 传感器:传感器可以让机器人感知周围的环境,如视觉传感器、声音传感器、触觉传感器等。这些传感器可以帮助机器人自主地感知周围环境,并根据需要采取行动。 视觉系统:视觉系统包括相机、激光扫描仪、红外传感器等,可以帮助机器人感知周围的环境和识别物体。视觉系统通常与人工智能技术相结合,可以让机器人学习和识别更复杂的物体和场景。 人工智能:人工智能技术可以帮助机器人进行决策和规划。通过机器学习、深度学习等技术,机器人可以自主地学习并实现自主规划,实现更加复杂的任务。 控制系统:控制系统可以帮助机器人控制其运动和行为。控制系统通常由计算机程序和电子设备组成,可以让机器人实现精度的运动和行为控制。
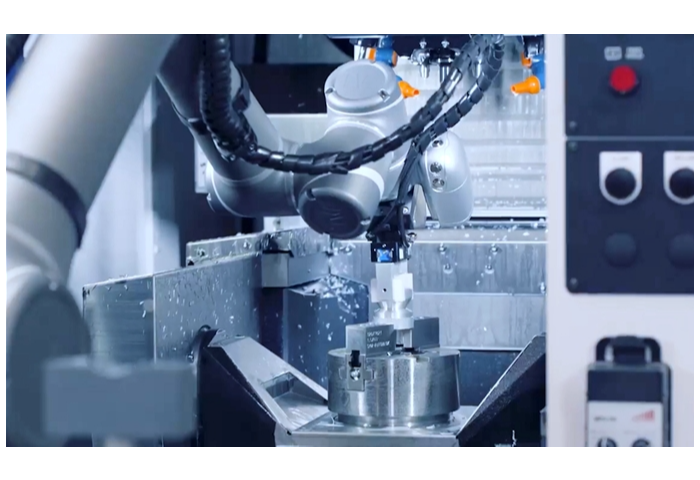
复合机器人产品特点 搭载协作机器人和机器视觉系统,在人机混合的车间代替人工完成对物料的自动定位,自动搬运和机台的自动上下料。 复合机器人搭载协作式机械臂:六轴式机械臂,灵活操作 适用于人机混合工况:可以在接触到人的情况下停止运动,无需安全围栏,不占用厂房面积。 广角度抓取范围:支持360度抓取工装夹具。 通用性强:可搭配不同夹具适配于不同场合的自动上下料。 定位:机器视觉系统实现亳米级定。 智能电源管理:自主智能充电,7*24小时全天候运行。达明机器人(上海)有限公司为您提供复合机器人,欢迎您的来电!

半导体行业对机器人要求极,首先是洁净度。就目前复合移动机器人应用量的封测厂来说,封装前段厂房洁净度要求能达到十级。另外,想要突破洁净度限制进入晶圆厂,洁净度更是要达到ISO CLASS 3以上。 其次是震动等级,比如其中一道减薄划片工艺中,如果搬运中超过0.5g的振动,就会破屏,一个晶圆盒就是几十万元的损失;再次是安全等级,在人机交互的场景里,机器人不能撞到设备,第二不能撞到人,这些都需要满足安全认证;再之是稳定性要求,搬运一个8寸的晶圆盒相当于将千万元背在机器人身上,一旦出现一次损失可能这家企业就要离开这个行业了;是精度要求,在对接机台时不能出现任何偏差。复合机器人,就选达明机器人(上海)有限公司,有需要可以联系我司哦!上海智能工厂复合机器人
复合机器人,就选达明机器人(上海)有限公司,让您满意,欢迎您的来电!江苏AMR复合机器人工作原理
在人机协作模式下,人类与协作机器人相互携手合作并且截长补短,可望带动生产效率与弹性的提升。而有不少厂商也开始思考如何让人类与机器人透过更好的协作方式让彼此发挥更大的价值,从跳脱传统防护栅栏、区域隔离到如今近距离互动,不难发现人机共工越来越贴合密切,市场认为,在下一端段,移动性将是机器人十分重要的应用模式之一。柔性复合机器人在进行设计的过程中,所采用的是激光导航的形式进行设计的,施工量小且地面不需要任何诱导线的设计,在路径的改变上十分灵活,系统柔性很大。江苏AMR复合机器人工作原理





