一般复合机器人应用场景较为复,在特定场景下不仅需要进行挪动运送上料任务,又需要添加生产线担负实际技术工种加工的实际操作,因而,复合机器人针对AGV小轿车环境适应能力具有很的规定。复合型运送机器人机械手臂包括了多骨关节机器人、直角坐标系机器人、SCARA机器人及协作机器人等,相对来说,AGV+协作机器人(也称之为复合机器人)更加精细化管理,可以可用更加复杂、精密的生活环境,可以穿行各种各样应用场景而且做相对性工作,相对性传统式机器人更加效,深受销售市场关心。达明机器人(上海)有限公司致力于提供复合机器人,竭诚为您服务。浙江大负载复合机器人工作原理

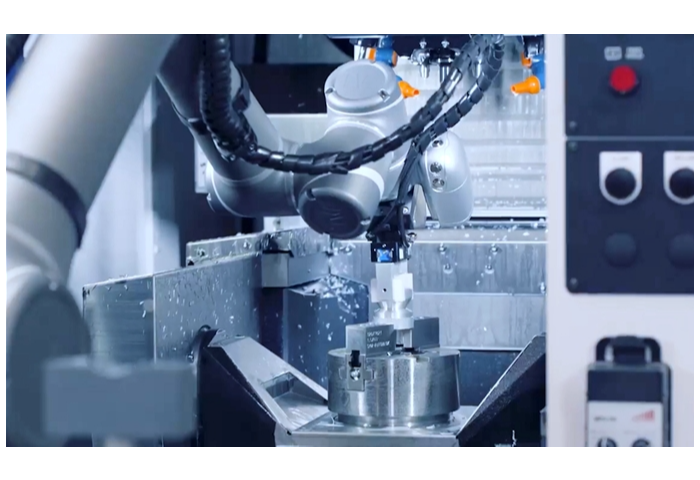
达明机器人针对AGV/AMR搭配的复合机器人应用场景,推出直流电源版本的手臂(M系列),透过TM特有的Landmark及TMvision视觉系统建立动态相对坐标体系并实现跨手臂点位共享,弥补AMR行走的运动偏差并定位、平稳取放,非常适用于医疗及半导体行业移动搬运、智能巡检、移动式堆栈、加工机床上下料等要求机动性、精度的应用。这种模块化的设计特点对于机器人期的拆装更换、维护维修等方面是十分便利的。柔性复合机器人的运作是不需要进行任何控制柜的外接的,这对于机器人的抓取、行走等行为的控制来说也十分方便。浙江复合机器人配件达明机器人(上海)有限公司为您提供复合机器人,有想法可以来我司!

移动底盘的安全措施至关重要,必须确保复合机器人在运行过程中的自身安全,以及现场人员与各类设备的安全。一般情况下,复合机器人都采取多级硬件和软件的安全监控措施。如在底盘前端设有非接触式防碰传感器和接触式防碰传感器,底盘顶部安装有醒目的信号灯和声音报警装置,用来提醒周围的操作人员。对需要前双向运行或有侧向移动需要的复合机器人,则防碰传感器需要在移动底盘的四面安装。一旦发生故障,自动进行声光报警,同时采用无线通讯方式通知监控系统。
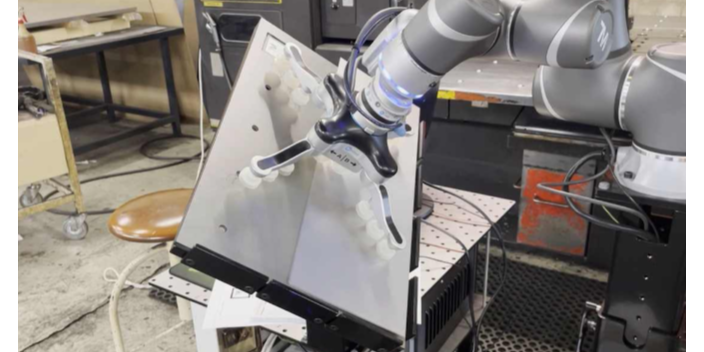
当前的制造业为适应快速多变且多元的环境,若要达到更深度的人机协作,势必需要具备更多功能的机器人,像是目前产在线的机器人多半仍采取固定位置执行单一功能,因此近年便有不少厂商开始推动移动协作机器人的构想,在市场上也陆续出现由机器手臂与无人车或是AMR结合所组成具有度自适应性的弹性生产系统。达明机器人复合机器人由AMR小车(移动机器人)和协作机器人集成,采用激光导航技术,配备内置传感器、相机和成熟的软件,AMR移动机器人可识别周围环境,采取到达目的地的路线,安全避开障碍物和人员。配备完善的安全系统及模块化的工装配件,兼具协作机器人安全、操作简易、作业灵活等多重优势,大幅度简化现场应用过程,极大地提升了使用的经济性。达明机器人(上海)有限公司为您提供复合机器人,欢迎新老客户来电!

AGV复合机器人一般导航方法较为,优势就是灵便,所以一般不会选择磁导航或是二维码导航,大部分用以激光器导航或是当然导航,无需设定一切协助设备,保证能够短路径算法,导航,完成彻底有轨,途径自由飞翔,提了复合机器人的软性。AGV复合机器人不单单是AGV+机械臂。AGV还可以跟许多自动化机械开展结合,AGV的重要目的是走动运送,再加上不同类型的工业设备可以完成多种多样作用,如自动分拣,全自动喷撒,全自动上料,自动送料,自动码垛等作业。达明机器人(上海)有限公司致力于提供复合机器人,有想法的不要错过哦!福建包装复合机器人控制
达明机器人(上海)有限公司为您提供复合机器人,有需求可以来电!浙江大负载复合机器人工作原理
AGV复合机器人是一款采用移动AGV底盘结合机械臂进行工业协作的机器人。采用激光导航技术,配备内置传感器和成熟的系统软件,AGV复合机器人可通过调度系统按既定巡航路线接受指令到达定点位置完成指定的抓取搬运等动作。运用SLAM算法,配备完善的安全系统及模块,使AGV复合机器人具备安全、操作简单、作业灵活等多重优势,大幅度简化现场应用过程,适合对空间和路径要求比较的物流系统或工业场景运用。这种模块化的设计特点对于机器人期的拆装更换、维护维修等方面是十分便利的。柔性复合机器人的运作是不需要进行任何控制柜的外接的,这对于机器人的抓取、行走等行为的控制来说也十分方便。浙江大负载复合机器人工作原理