多元融合,适配各类车辆接口 为了进一步提升复杂环境下定位系统的鲁棒性和可靠性,M39创新性地支持通过CAN总线接入车辆的轮速传感器信号和里程计信息。这种多传感器深度融合的设计理念,使得惯导系统能够在GNSS信号长期失锁的情况下,例如穿越长隧道、地下停车场或多层立交桥下,依然能够依靠车辆自身的运动学信息进行高精度的航位推算,有效抑制纯惯性导航的位置发散速度,保持定位轨迹的平滑与准确。无论是乘用车、商用车、物流配送车还是特种作业车辆,M39都能灵活适配其车辆总线协议,实现与车辆电子电气架构的深度耦合与即插即用,大、大降低了后装改造的复杂度和成本,让高精度定位技术能够快速部署到各类移动平台上。全密封可靠结构设计,POS520无惧盐雾沙尘侵蚀,军、工品质值得信赖。青海高可靠惯性导航
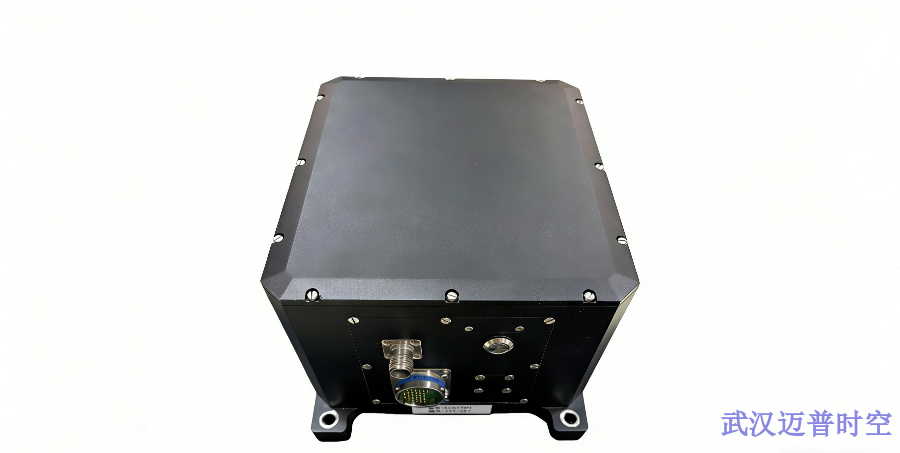
军、工品质,信赖源自可靠 依托母公司赛微电子的成熟GI平台和军、用级产品研发体系,POS系列产品在设计之初就严格遵循了军、工标准的质量管控流程。全密封的金属外壳设计能够有效防止盐雾、湿气和沙尘的侵蚀,确保在恶劣的海洋环境和沙漠气候中长期稳定运行;经过严格测试的抗振动冲击能力,能够承受高达30g的冲击载荷而不损坏。这种源自军、工领域的可靠性设计,使得POS系列不只能从容应对民用测绘的各种挑战,更能胜任武器装备测试、飞行器航姿参考系统、舰船稳定平台等高、端军、用或准军、用领域的严苛要求,其坚固耐用的品质已在京广线等数千公里的铁路检测项目中得到充分验证。福建高稳定性惯性导航公司三星七频全星系跟踪,迈普时空惯导让高楼林立的城市峡谷不再可怕。

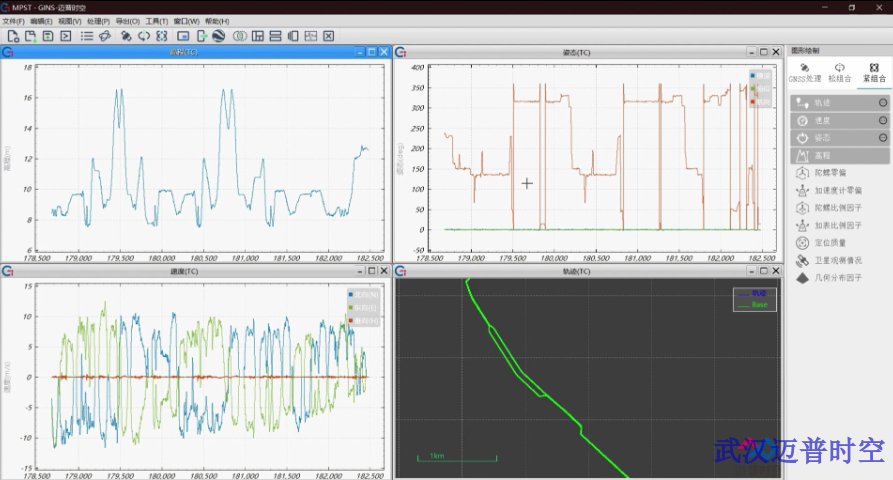
实时200Hz,捕捉每一个动态细节 无论是高速飞行的固定翼无人机,还是剧烈颠簸的高速铁路轨检车,POS520都能以高达200Hz的超高刷新率实时输出姿态、位置和速度信息。这种高频输出能力能够完美捕捉载体每一瞬间的运动状态,包括细微的抖动、快速的转弯和突然的加减速。对于后续的影像运动补偿、激光点云畸变修正以及动态物体的轨迹分析而言,每一帧高频数据都至关重要。每一次俯仰、每一次横滚、每一次加速的变化都被忠实记录,确保蕞终成果的动态精度达到极、致水平,为高、端动态测量应用提供了坚实的数据基础。
为高速铁路做“CT”——轨道几何检测 搭载了POS520或POS620高精度定位定姿系统的轨道检测小车,就如同给高速铁路做一次全、方、位的“CT扫描”一样。系统能以高达200Hz的频率实时、精确地测量轨道的轨距、水平、高低、方向和三角坑等关键几何参数,并通过专业后处理软件计算轨道的长波不平顺性和各项平顺度指标。这种高效、精、准的检测手段已经成功应用于京广线、京沪线等国家高速铁路干线,为工务部门的日常维护保养、大机捣固作业和轨道状态评估提供了精确的数据指导和决策依据,有效保障了高速列车运行的高平顺性和广大旅客乘坐的舒适度,为高铁安全运营保驾护航。石英挠性加速度计加持,POS520敏感极细微振动,动态响应线性如一。

专注高精度定位需求,迈普时空 POS520 以优、质硬件为基础,光纤陀螺与石英挠性加速度计确保姿态测量精、准,三星七频 GNSS 板卡保障位置定位可靠。200HZ 实时输出速率满足高频应用需求,里程计输入增强定位连续性,网线接入差分数据提升精度稳定性。全温补偿技术突破温度限制,PPS/GPRMC 输出保障时间同步,内置存储记录完整数据。全中文可视化软件降低操作难度,多后处理软件兼容方便数据二次分析,是各行业高精度导航定位的优、质选择。轻量化结构设计,POS320完美适配无人机载LiDAR系统,赋能航空测绘。江苏大型惯性导航出租
0.005°姿态精度,POS520为移动测量系统提供钢铁般稳定的测量平台。青海高可靠惯性导航
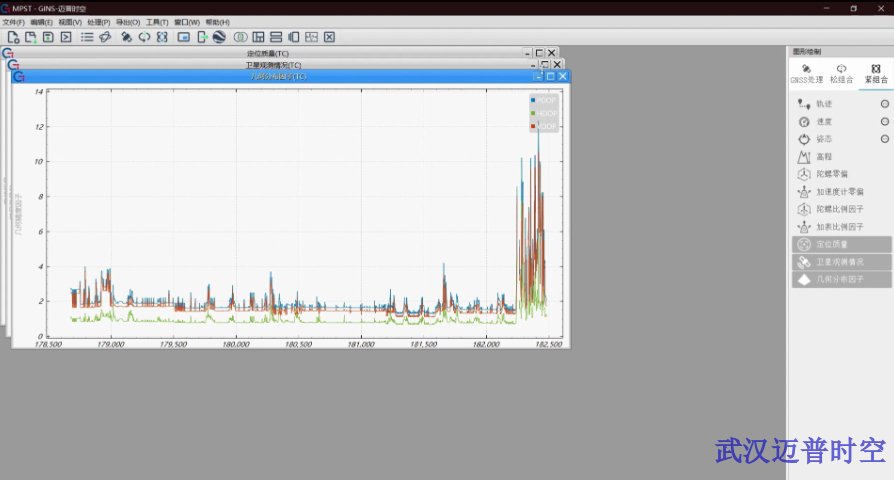
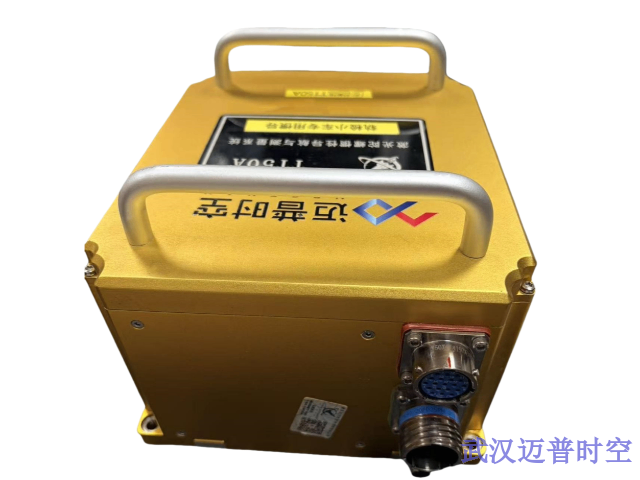
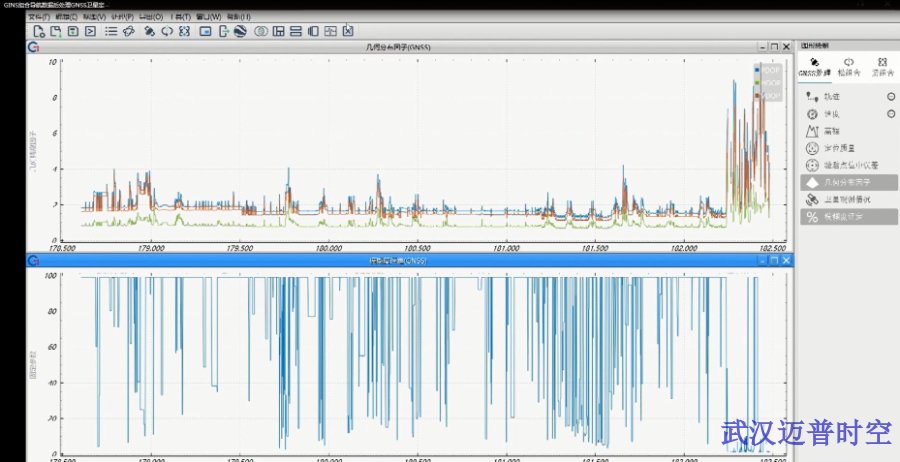
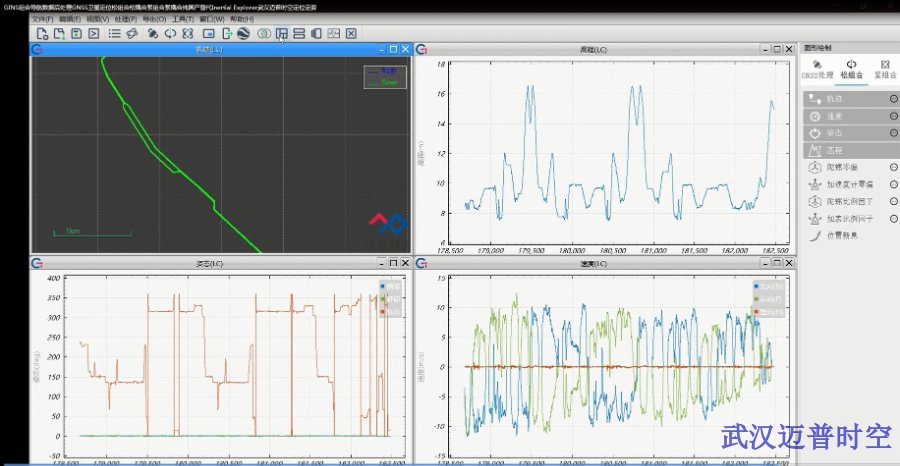
POS520是迈普时空公司的一款高精度光纤组合导航定位定姿系统,由高精度三星七频GNSS板卡、高精度光纤陀螺和石英挠性加速度计组成,具备实时姿态和位置解算能力,通过内部存储记录导航结果及原始数据,可支持高精度后处理解算。
POS520产品特点:
1.内置高精度测量型双天线板卡(GPSL1\L2\L5、北斗B1\B2、GLONASSL1\L2)
2.支持串口200HZ姿态、位置、时间、速度实时输出及原始数据输出
3.支持里程计输入
4.支持网线接入网络差分数据
5.支持惯导安装角、双天线标定补偿
6.支持PPS/GPRMC输出
7.支持内部存储
8.全温补偿
9.配套全中文实时导航结果显示、配置软件
10.兼容多种后处理软件 青海高可靠惯性导航
武汉迈普时空导航科技有限公司(简称“迈普时空”)是一家专业从事北斗精密定位定姿及应用的高、新、技、术企业。公司依托武汉大学卫星导航定位技术研究中心由中国工程院院士、“千人、计划”、“长江学者”、海外归国专、家5人合伙创立。公司致力于北斗GNSS/INS组合导航产品软硬件系统的集成、研发与应用,以定位定姿系统(POS)作为其GNSS/INS组合导航产品和服务的突破口,面向国内外车载、机载和船载的高精度定位定姿应用,在突破测绘遥感应用的基础上,为精密工程测量、移动测绘、高铁轨道几何形变检测等工程技术应用提供综合技术服务;为精细农业机械、无人机遥感、车载移动测绘、自动驾驶汽车等提供精、准定位定姿设备。